

Joint operation platform for multiple flying robots
A flying robot and operating platform technology, applied in the direction of instruments, non-electric variable control, attitude control, etc., can solve the problems of single aircraft performance limitations, low adaptability, etc., to improve service life and operating efficiency, high synergy, integration high degree of effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
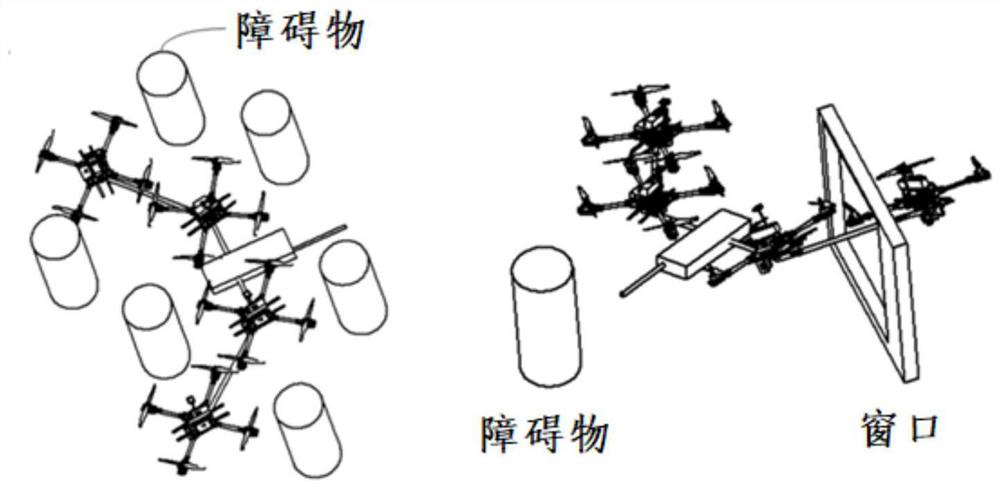
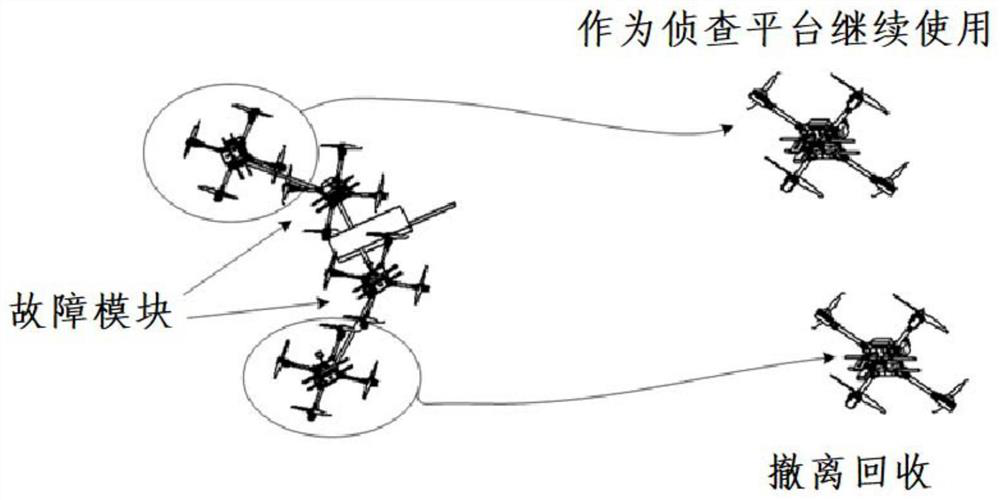
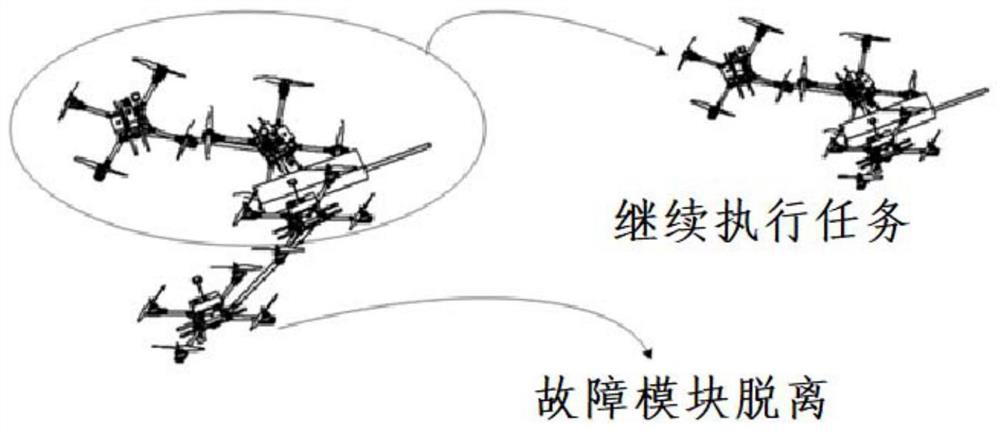
[0028] A multi-flying robot integrated operating platform, the integrated operating platform includes a central control module, a sub-aircraft module and a load module;
[0029] The central control module includes a central processing unit, flight control I and control bus I, and the central processing unit can use various computers with computing functions and data storage functions such as TX2 to process embedded development according to the realized functions and the size of data storage capacity. board; the central processor can be connected to the flight controller Ⅰ through USB, and the flight controller Ⅰ is used to obtain the position and attitude information of the sub-aircraft modules and transmit them to the central processor. Attitude confidence such as the executed attitude angle and pull vector, and send drive commands to each sub-aircraft module through the control bus I;
[0030] The mechanical structure of the sub-aircraft module can be a four-rotor robot acco...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More