

Steering-by-wire system modeling control method for processing state inequality constraints
An equation-constrained, steer-by-wire technology, applied in control/adjustment systems, two-dimensional position/course control, vehicle position/route/height control, etc., can solve steering control deviation, reduce vehicle stability, and difficult Ensure that the state quantity of the system will not exceed the given boundary and other problems, so as to achieve the effect of accurate tracking trajectory and satisfying motion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
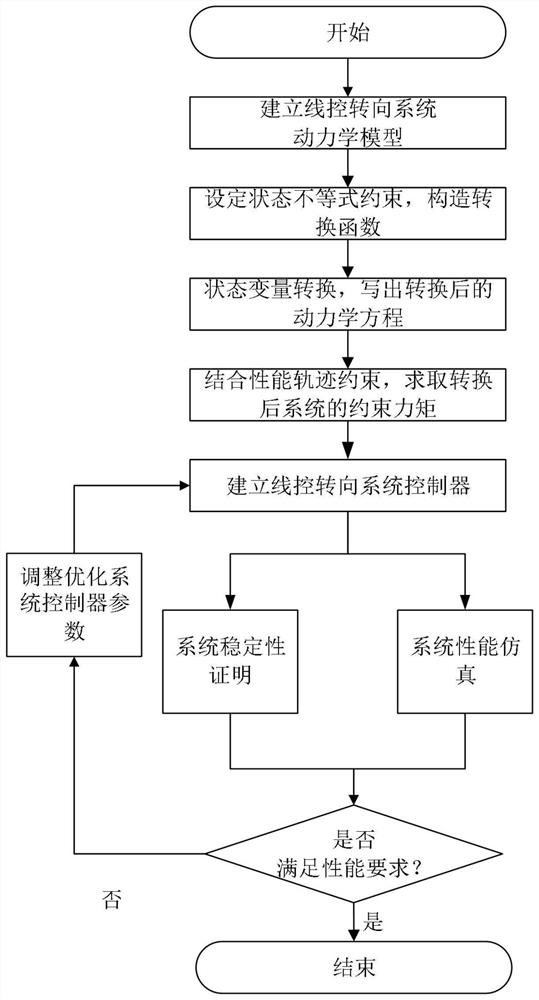
[0070] Such as figure 1 As shown, this embodiment provides a modeling control method for a steer-by-wire system that can handle state inequality constraints, and the operation steps are as follows:
[0071] S1. Establishing a dynamic model of the steering-by-wire system;
[0072] S2. Based on the limitation of the state inequality constraints in the actual working process of the system, construct a conversion function of one-to-one mapping;
[0073] S3. Use the conversion function to convert the state variable constrained by the state inequality in the system into a new "free" state variable, and obtain the dynamic equation after the variable conversion;
[0074] S4. Aiming at the converted kinetic equations and performance constraints, a controller based on Udwadia-Kalaba theory is established to control the operation of the system.
[0075] Further, the dynamic model of the steer-by-wire system constructed in S1 is:
[0076]
[0077] Among them, J eq Indicates the equ...
Embodiment 2
[0122] Embodiment 2: Based on Embodiment 1, but different:
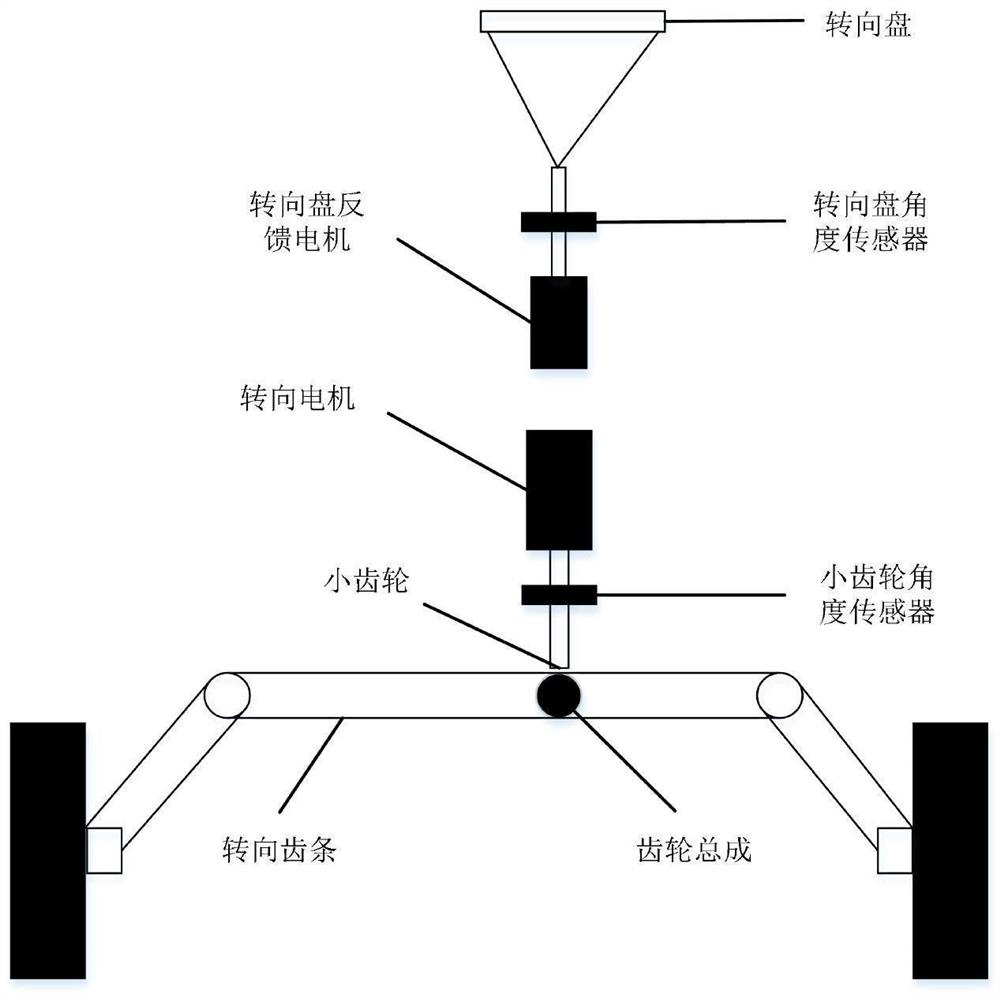
[0123] figure 2 The steer-by-wire system shown is the object of modeling and control of the present invention. Such as figure 2 As shown, the system can be divided into two parts: the upper part includes the steering wheel, steering wheel angle sensor and feedback motor; the lower part includes the steering motor, pinion angle sensor, rack-and-pinion gearbox and steering front wheels. The steering wheel feedback motor simulates the interaction between the vehicle's front wheels and the road surface during driving, providing the driver with a real sense of the road; the front wheel steering motor provides the actual steering torque to the two front wheels through the rack and pinion gearbox and the steering arm ;Angle sensor collects steering angle information for closed-loop control.
Embodiment 3
[0124] Embodiment 3: Based on Embodiment 1 and 2, but different:
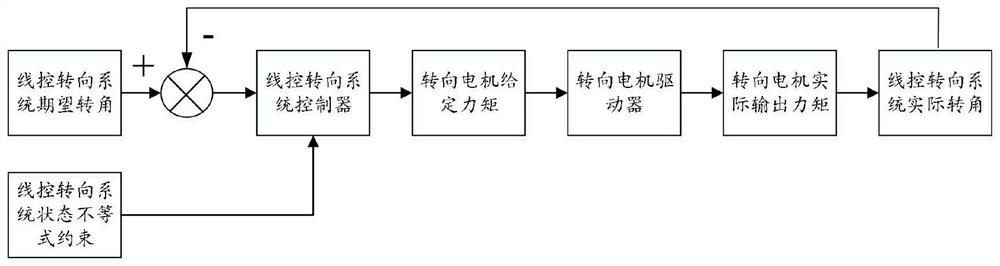
[0125] image 3 The controller input shown is the steering angle of the steering-by-wire system and the given state inequality constraints. The control torque required by the front wheel steering motor is calculated by the steering-by-wire system controller, and the actual steering angle measured by the angle sensor is obtained through negative feedback. The controller performs closed-loop control adjustment, and finally makes the steering angle of the front wheels of the steer-by-wire system accurately reach the desired steering angle and does not exceed a given boundary. The controller here is the controller of the entire system, and the steer-by-wire system controller is the core Invention set forth in the controller.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More