

Disinfection robot design method based on multi-feature fusion and attention weight obstacle avoidance
A multi-feature fusion and design method technology, which is applied in disinfection, biometric identification, sanitary equipment for toilets, etc., can solve problems such as narrow working space and prone to dead zones, and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
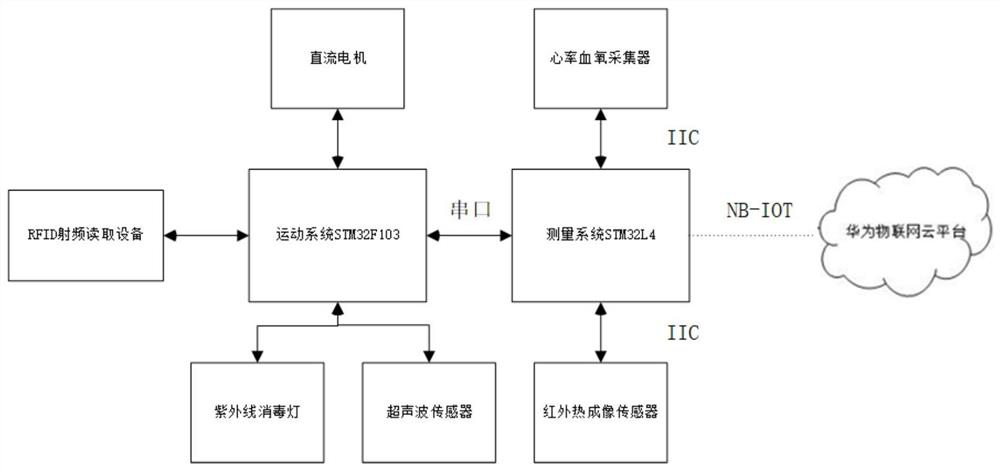
[0047] Attached below figure 1 System hardware overall structural diagram and specific implementation mode are described in further detail to the present invention:
[0048]In the present invention, the main controller is used to collect data from various sensors and drive various actuators to complete the functions of data monitoring of the system and robot motion control. The main control chip adopts STM32F103 series and STM32L4 series low-power processors. As the control chip of the measurement system, STM32L4 uses Huawei LiteOS lightweight IoT operating system to realize data measurement and communication with Huawei IoT cloud platform. Huawei IoT cloud platform detects whether there are pedestrians on the driving route through the pedestrian detection model, and Send the obstacle avoidance command to the STM32F103, and the STM32F103 is used to identify the positioning information and control the movement of the robot.
[0049] Step 1, design the hardware facilities of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More