

Six-degree-of-freedom respiratory compensation needle puncture robot compatible with CT
A breathing compensation and robotic technology, applied in surgical robots, puncture needles, trocars, etc., can solve the problems of inability to arrange medical staff, poor effect, accurate positioning errors, etc., and achieve the effect of reducing CT radiation intensity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0099] The present invention will be further described below in conjunction with the accompanying drawings and specific implementation.
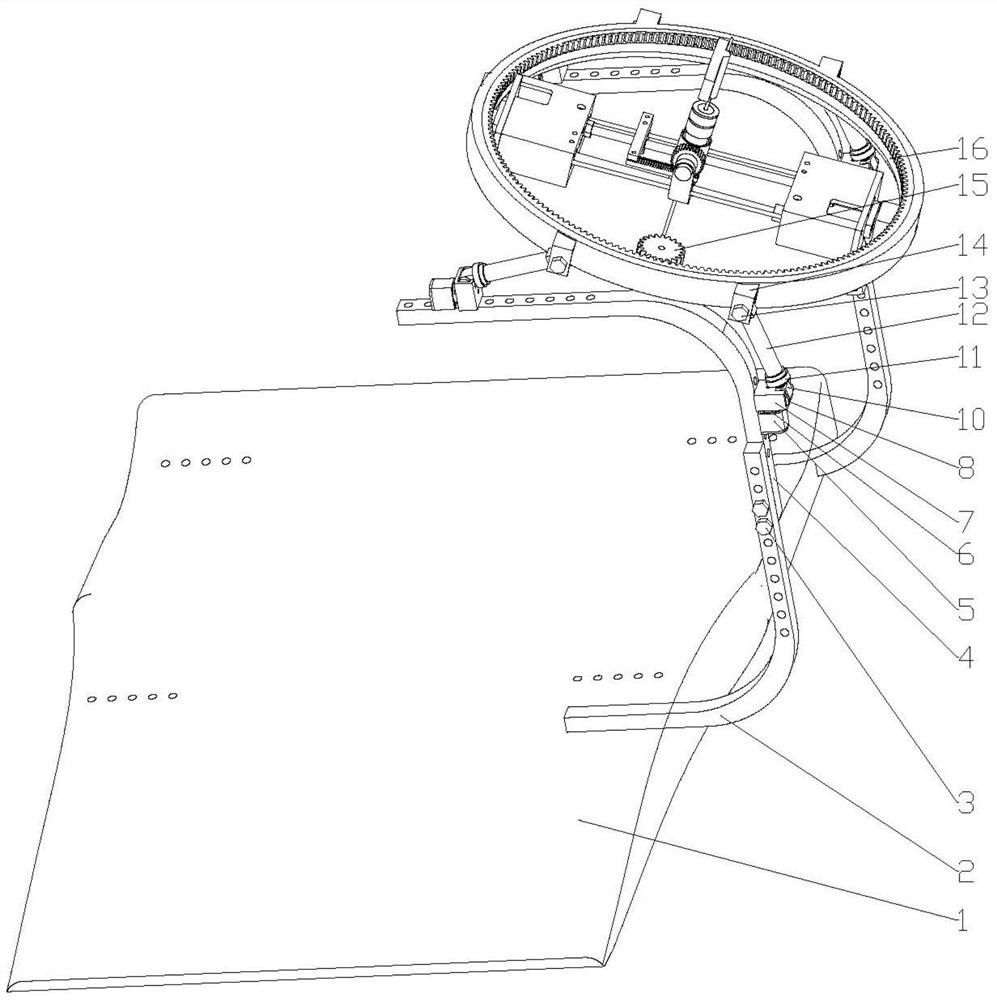
[0100] Such as figure 1 As shown, the robot includes a wearable vest guide rail module, a respiratory motion adaptive robot needle seat module, and a puncture needle six-degree-of-freedom robot module; the wearable vest guide rail module is located around the human body, usually around the chest, and the respiratory motion adaptive robot needle seat The module is installed on the guide rail module of the wearable vest, and the six-degree-of-freedom robot module of the puncture needle is installed on the needle seat module of the respiratory motion adaptive robot; the needle seat module of the respiratory motion adaptive robot is supported by the wearable vest rail module and drives the respiratory motion adaptive robot. The needle base module of the robot is used for posture adjustment and adaptation, and the six-degree-of-freedom robot modu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More