Investigation mobile robot based on continuum mechanism
A mobile robot and continuum technology, applied in the field of reconnaissance robots, can solve the problems of complex and changeable detection task environment, poor environmental adaptability, and inability to pass through complex-shaped passages, etc., to achieve stable motion, strong environmental adaptability, and degrees of freedom. high effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
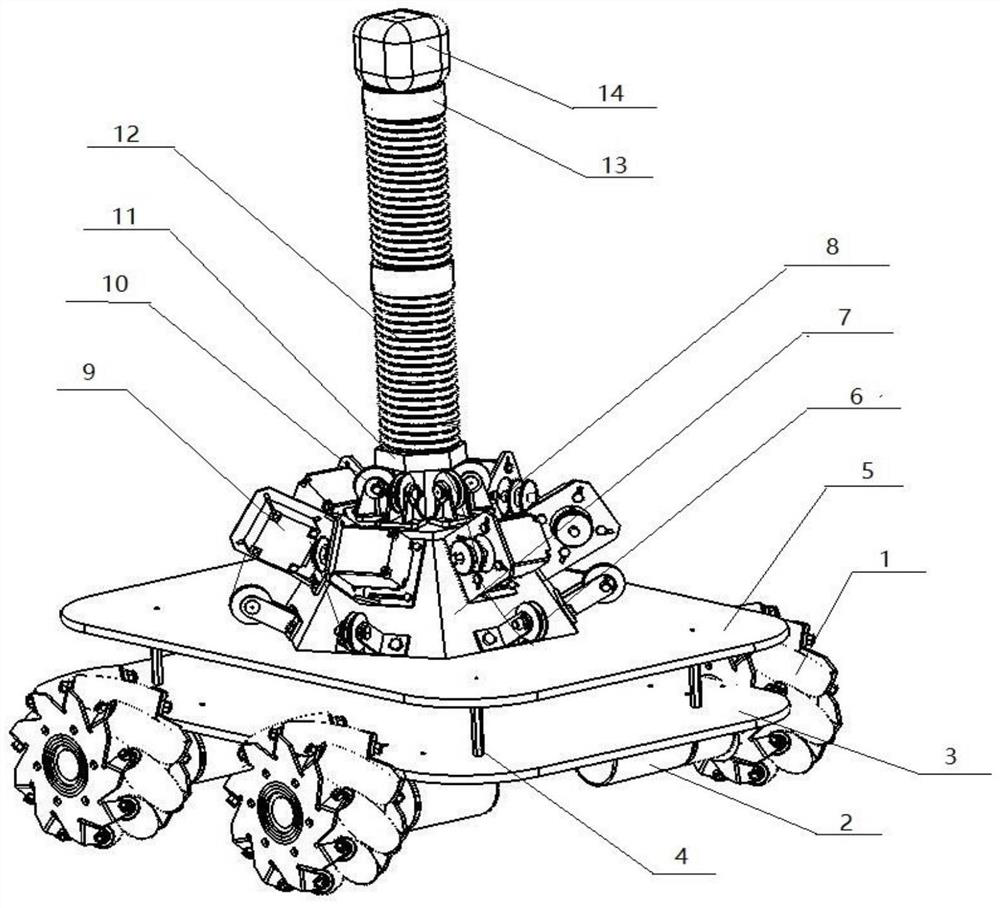
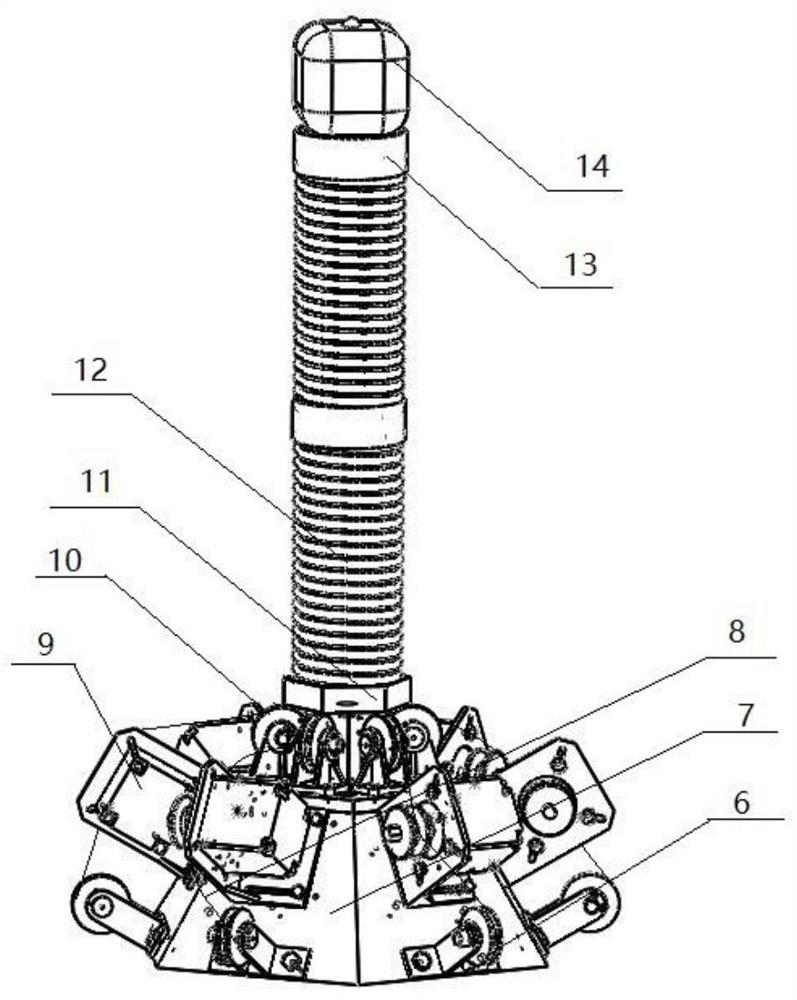
[0011] Such as figure 1 , 2 As shown, the reconnaissance mobile robot based on the continuum mechanism is composed of a mecanum wheel 1, a DC gear motor 2, a lower chassis 3, a copper pillar 4, an upper chassis 5, a winding wheel 6, a mechanical arm base 7, a steel wire 8, Stepper motor 9, steel wire guide wheel 10, base connector 11, continuum mechanism 12, continuum connector 13, camera 14, the mecanum wheel 1 is driven by a DC gear motor 2 to move in all directions, The Mecanum wheel 1 and the DC gear motor 2 are installed on the lower chassis 3, the lower chassis 3 and the upper chassis 5 are connected by copper pillars 4, the mechanical arm base 7 is installed on the upper chassis 5, and the continuum mechanism 12 is installed on the base connector 11. The body mechanism 12 is connected by a continuum connector 13, one end of the steel wire 8 is fixed on the winding wheel 6, and the wire is wound by a stepping motor 9, and the steel wire 8 passes through the steel wire g...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com