

Control system and method for multi-stage safety handle of excavator
A handle control and excavator technology, which is applied in the direction of earth mover/shovel, construction, etc., can solve the problems of blind spots in large field of view, unavoidable safety problems, collisions, stepping on air, etc., so as to reduce safety hazards and increase secondary Effects of protecting and improving work safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
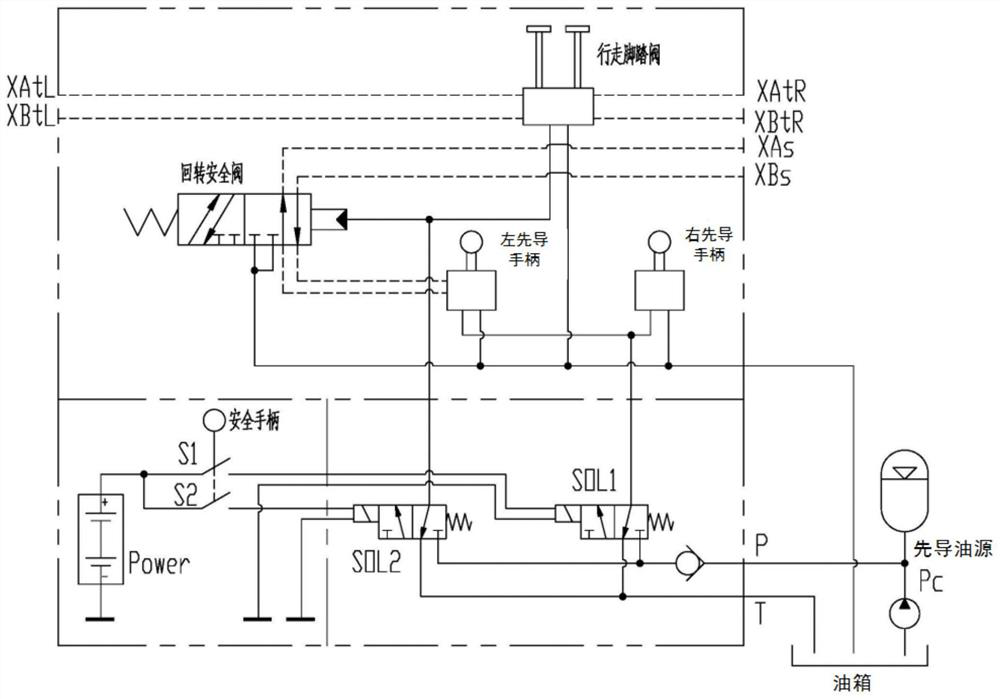
[0032] An embodiment of the present invention provides an excavator multi-level safety handle control system, such as figure 1 As shown, including: primary contact switch, secondary contact switch, safety handle, pilot oil source, left pilot handle, right pilot handle, primary safety solenoid valve, secondary safety solenoid valve, rotary safety valve and walking foot valve ;
[0033] The first-level contact switch S1 and the second-level contact switch S2 are set independently, both of which are set in the safety handle; in actual use, the first-level contact switch S1 and the second-level contact switch S2 are connected to the electromagnetic Valve power supply;
[0034] The first-level safety solenoid valve SOL1 is connected to the first-level contact switch S1, and is connected to the pilot oil source, the left pilot handle and the right pilot handle respectively, to control the oil source supply of the left pilot handle and the right pilot handle;
[0035] The walking p...
Embodiment 2
[0045] An embodiment of the present invention provides a control method based on the excavator multi-level safety handle control system described in any one of Embodiment 1, including the following steps:
[0046] (1) Use the safety handle to control the on-off state of the primary contact switch S1 and the secondary contact switch S2;
[0047] (2) Use the first-level safety solenoid valve SOL1 to control the oil source supply of the left pilot handle and the right pilot handle;
[0048] (3) Use the secondary safety solenoid valve SOL2 to control the oil source supply of the walking foot valve, and at the same time control the on-off state of the rotary safety valve;
[0049] (4) Realize the control of the excavator according to the oil supply conditions of the left pilot handle, the right pilot handle and the walking foot valve, as well as the on-off status of the rotary safety valve.
[0050] Specifically, the control method includes the following processes:
[0051] When ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More