A variable stiffness joint hydraulic drive system for an exoskeleton robot
An exoskeleton robot and drive system technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as non-adjustable hydraulic cylinder stiffness, many oil pipe and oil pipe joints, human body touching the ground or bouncing stiffly, etc. Wearing comfort, realizing the effect of variable rigidity of driving and simple overall structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] In order to make it easy to understand the technical means, creative features, achieved goals and effects of the present invention, the present invention is further described below.
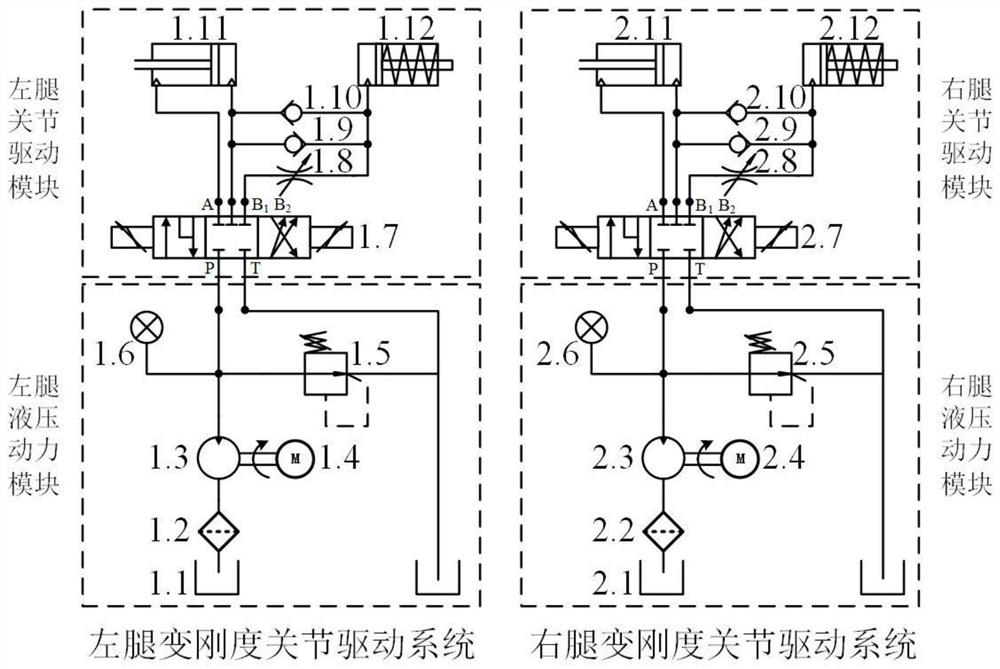
[0022] like Figure 1 to Figure 7 As shown, it includes a left leg variable stiffness joint drive system and a right leg variable stiffness joint drive system, which are respectively used to drive the left leg and the right leg and have the same internal structure. The drive system includes a hydraulic power module and a joint drive module that assists driving human walking. .
[0023] The invention adopts distributed power source to replace the centralized hydraulic power source in the exoskeleton backpack, solves the risk of oil leakage caused by the large number of oil pipes and oil pipe joints of the centralized hydraulic power source, reduces the complexity of system control, and at the same time integrates the centralized hydraulic power source. The hydraulic power source is decompo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com