

Vision-based underwater cluster neighbor tracking measurement method
A technology of tracking measurement and clustering, which is applied in the directions of measuring devices, surveying and navigation, image data processing, etc., can solve problems such as difficult to ensure tracking accuracy, and achieve the effect of good real-time performance and small amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] Embodiments of the present invention are described in detail below, and the embodiments are exemplary and intended to explain the present invention, but should not be construed as limiting the present invention.
[0058] In the embodiment of the present invention, the autonomous bionic robot fish Robolab-Edu is used as a test platform to verify the underwater cluster neighbor measurement method:
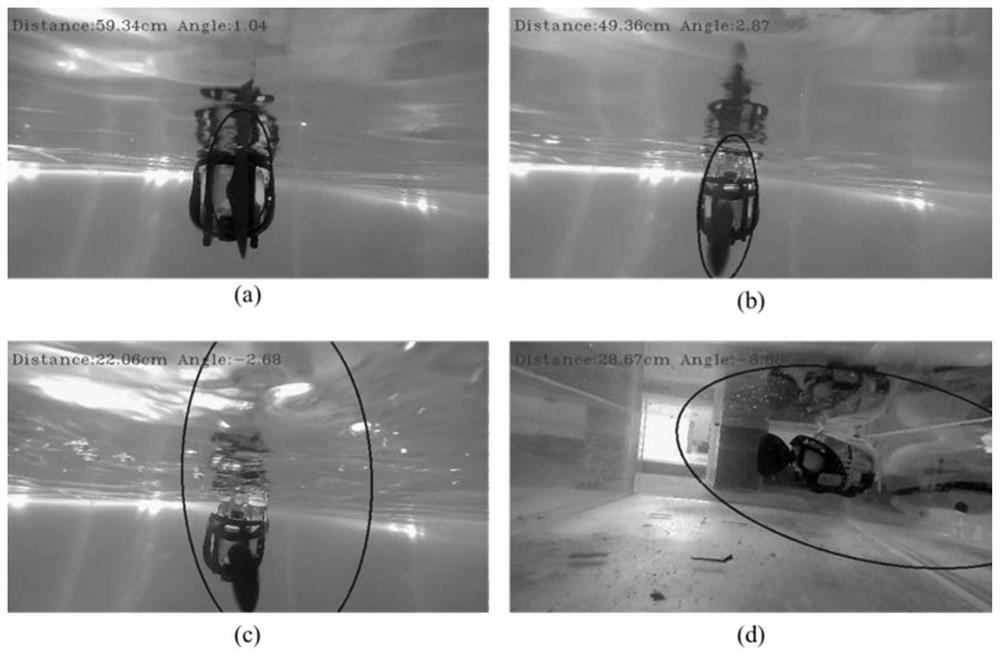
[0059] The robot fish (lower computer) and the PC (upper computer) communicate through WIFI through the router, so that the PC can remotely log in to the Nanopi-S2 of the robot fish, and carry out secondary development of its visual perception software system. In the experimental environment (such as Figure 4 ), the movement of the observation robot fish and neighbor robot fish is captured in real time by the camera erected above the pool, and transmitted to the PC to track and draw their trajectories.
[0060] Put the Robolab-Edu autonomous bionic robot fish into the experi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More