

Power transmission line inspection method and device based on robot, equipment and medium
A technology for power transmission lines and robots, applied in the field of robots, can solve the problems of complex action process and poor ability to overcome obstacles, and achieve the effect of improving the efficiency of inspection.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
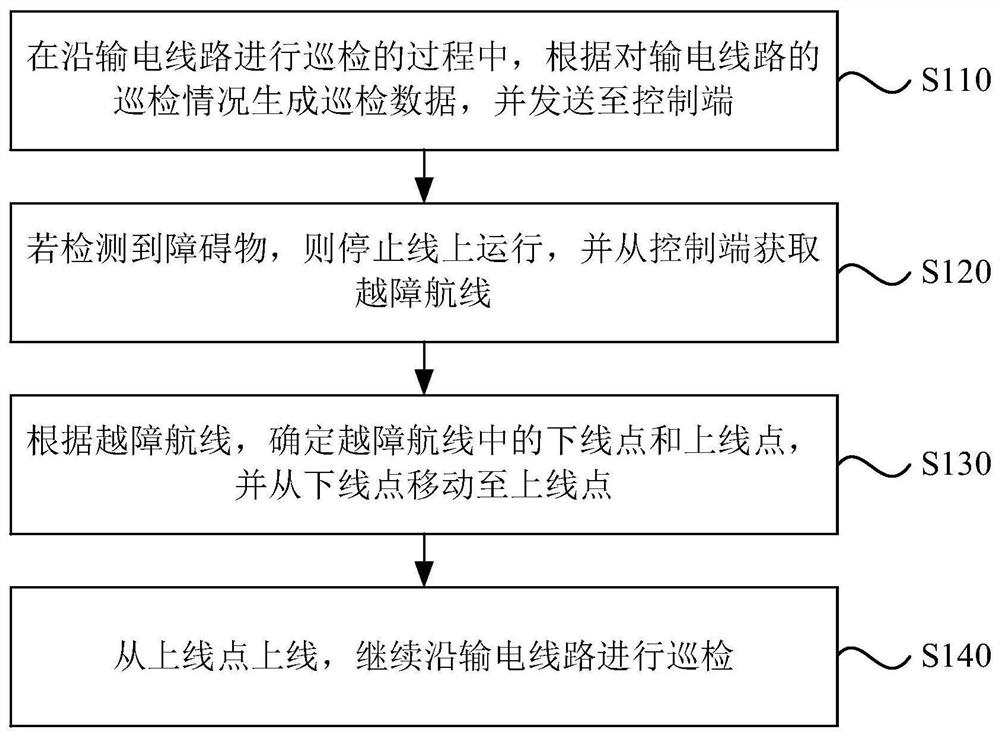
[0036] figure 1 A flow chart of a robot-based transmission line inspection method is provided by the embodiment of the present invention, and this embodiment can be applied to the use of robotic transmission line inspections, especially for inspection of high voltage transmission lines. The method is applied to the robot, and can be performed by a robotic power circuit panel inspection device according to an embodiment of the present invention, which can be implemented using software and / or hardware and can be integrated on an electronic device.
[0037] Specifically, such as figure 1 As shown, the embodiment of the present invention is provided based on robotic transmission line inspection methods may include the following steps:
[0038] S110, in the process of inspected along the transmission line, the inspection data is generated according to the inspection situation of the transmission line, and is sent to the control terminal.
[0039] Among them, the power transmission l...
Embodiment 2
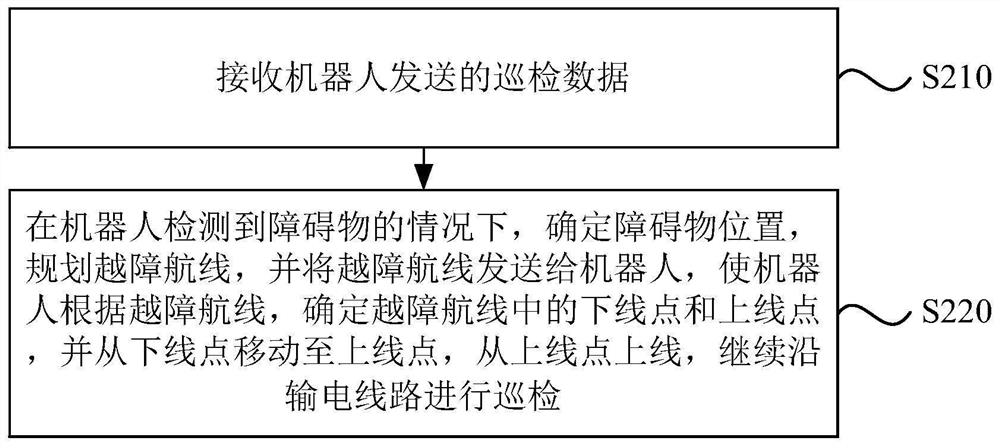
[0065] figure 2 A flow chart of a robot-based transmission line inspection method provided in the second embodiment of the present invention, this embodiment can be applied to the case of using robot for transmission line inspection, especially for high voltage transmission lines. The method is applied to the control terminal, and can be performed by a robot-based transmission line inspection device according to an embodiment of the present invention, which can be implemented in software and / or hardware and can be integrated on an electronic device.
[0066] Specifically, such as figure 2 As shown, the method includes:
[0067] S210, receives the inspection data sent by the robot.
[0068] Wherein, the inspection data includes at least: the discharge status data of the power device and real-time image data of the power device. Among them, the real-time image data of the power device includes at least the external form data image and power device temperature data image of the po...
Embodiment 3
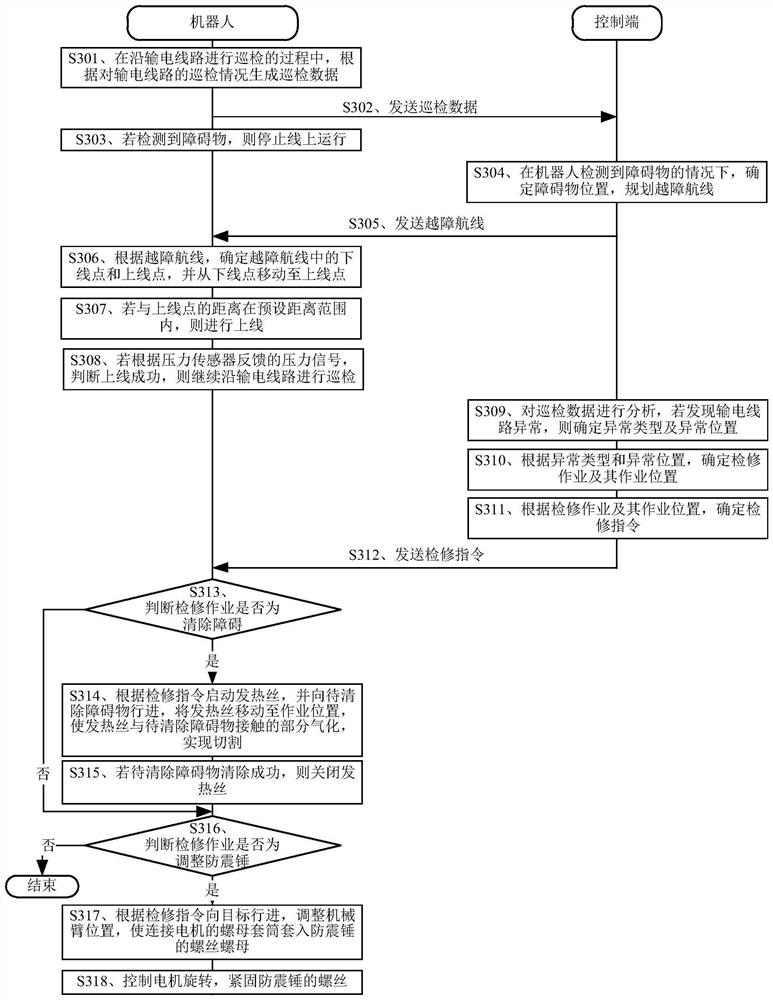
[0078] image 3 A flow chart of a robot-based transmission line inspection method is provided in the first embodiment of the present invention, and the present application provides a preferred embodiment of the technical solution of the above embodiments.
[0079] likeimage 3 As shown, the method includes:
[0080] S301, the robot is in the process of inspected along the transmission line, the inspection data is generated according to the inspection situation of the transmission line.
[0081] S302, send inspection data to the control terminal.
[0082] S303, if an obstacle is detected, the stop line is running.
[0083] S304, in the case where the robot detects an obstacle, the obstacle position is determined, planning the overcome airline.
[0084] S305 is sent to the robot overbased route.
[0085] S306, the robot determines the downline point and the upper line point in the crossbrick according to the affected airline, and moves from the lower line to the upper line.
[0086] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More