

State estimation method, device, equipment and medium of parallel configuration humanoid robot
A humanoid robot and state estimation technology, applied in the field of robotics, can solve the problems of reducing the state estimation accuracy and data inaccuracy of humanoid robots, and achieve the effect of solving the state estimation problem, improving the accuracy and ensuring the accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
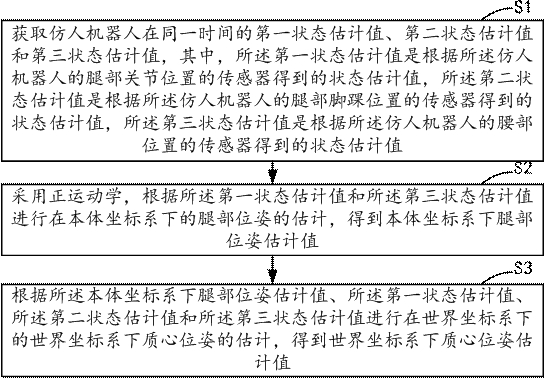
[0049] In order to make the purpose, technical solution and advantages of the present application clearer, the present application will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present application, and are not intended to limit the present application.
[0050] In order to solve the problem that the state estimation of the humanoid robot in the prior art is realized based on the data fed back by the sensor, because the internal state of the humanoid robot cannot be directly obtained through the sensor, and the data fed back by the sensor is inaccurate, thereby reducing the accuracy of the humanoid robot. The accuracy of the state estimation of humanoid robots, and because the existing gait planning and balance control algorithms of humanoid robots are based on series configurations, the gait planning and balance control of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More