Line feature SLAM initialization method based on maximum posterior IMU
An initialization method and maximum a posteriori technology, applied in image data processing, instruments, 3D modeling, etc., can solve the problems of less feature point extraction, initialization failure, positioning failure, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
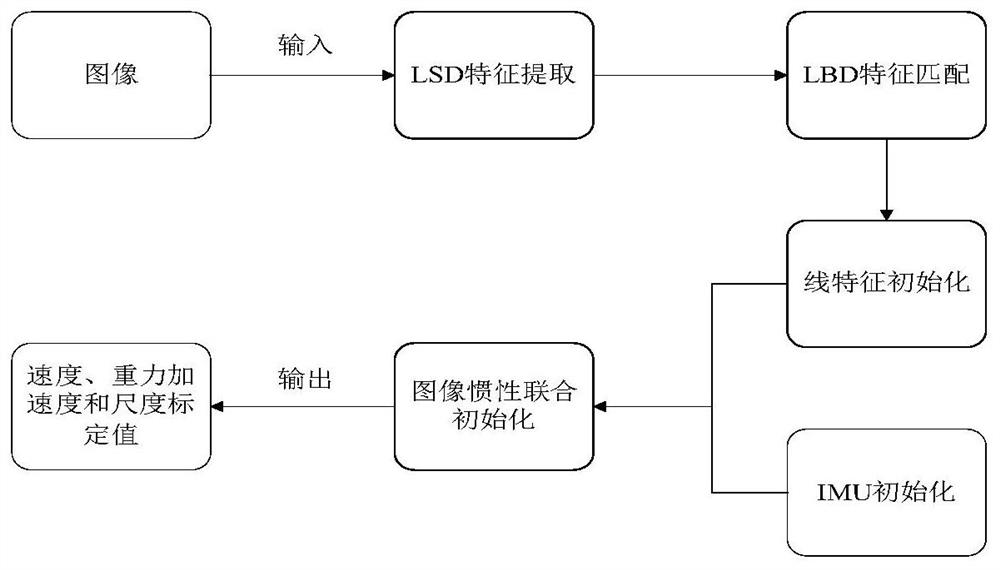
[0038] Depend on figure 1 It can be seen that the idea of the present invention is: first extract the line feature information in the image through the LSD algorithm, and then add the LBD descriptor to perform feature matching of the front and rear frames; the visual initialization first performs the camera pose initialization and uses PNP to solve the pose, and then performs the spatial line Feature initialization, use the matrix of the trifocal tensor and solve it to obtain the rotation matrix; IMU performs pre-integration to convert the IMU relative measurement information between frames into constrained nodes (carrier pose) to participate in the optimization framework, and measure the IMU relative It is processed so that it is decoupled from the absolute pose, which greatly improves the optimization speed. Finally, the final UAV pose is solved by joint ini...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com