A visual robot method and device for removing shellfish in raw water pipelines
A technology of robots and cleaning devices, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of inaccurate calculation of the accumulation volume of shellfish objects, pollution, poor effect, etc., to achieve high cleaning efficiency, reduce pollution, Easy to control and effective
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
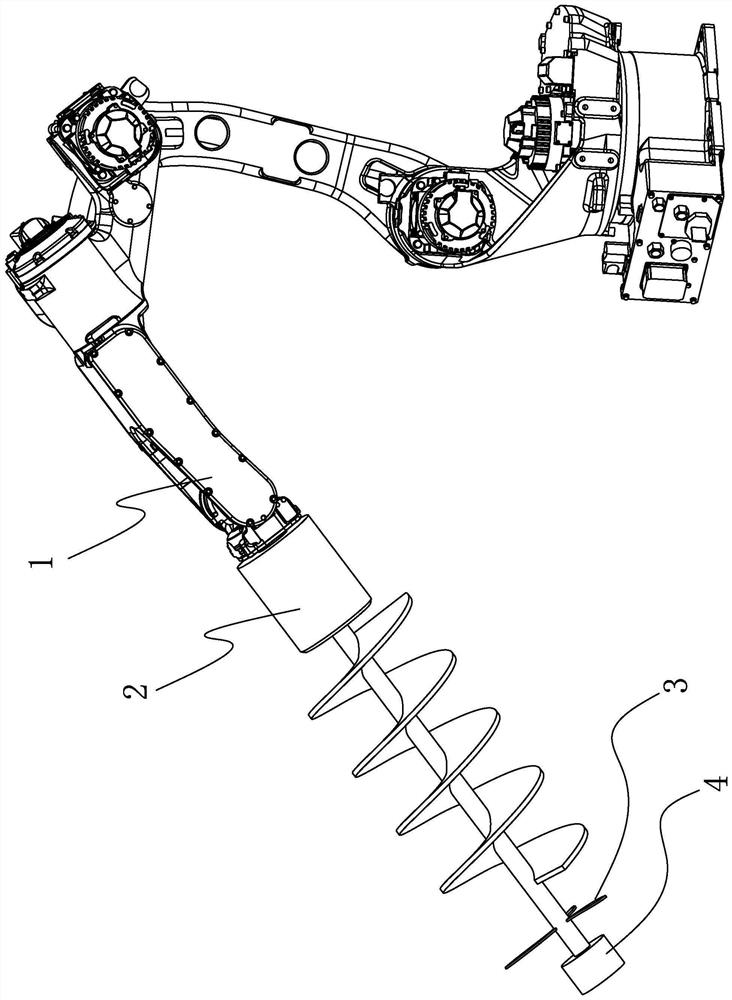
[0030] see Figure 1-Figure 4 , a visual robot device for removing shellfish in raw water pipelines, comprising a robot 1, a cleaning device 2 is provided on the driving arm of the robot 1, and a crushing device 3 and binocular The vision device 4 also includes a controller, the binocular vision device 4 communicates with the controller, and the controller communicates with the robot 1 , the cleaning device 2 and the crushing device 3 respectively.
[0031] The binocular vision device 4 includes two visual cameras and searchlights, which are used for image acquisition in the shellfish removal process, shellfish sundry identification, pipe arc wall identification, obstacle identification, and positioning of the combined tool for shellfish removal by profiling. , robot and distance measurement.
[0032] The cleaning device 2 includes a motor and a conve...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com