

Low-delay method for detecting mechanical arm collision by robot
A technology of robots and manipulators, which is applied in the field of low-latency robot detection of manipulator collisions. It can solve problems such as complex construction, collisions, and insufficient detection accuracy, and achieve efficient calculations and high detection accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention.
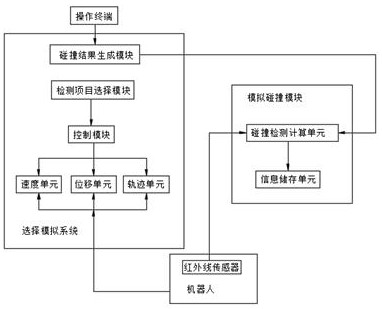
[0024] refer to Figure 1-2 , a method for a low-latency robot to detect a collision with a robotic arm, including the following operation methods:
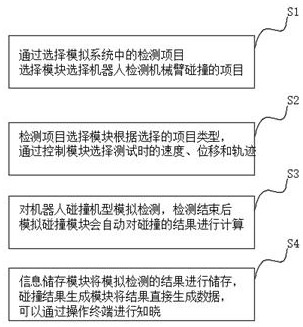
[0025] S1: Operate on the operation terminal first, and select the item for the robot to detect the collision of the mechanical arm by selecting the detection item selection module in the simulation system;
[0026] S2: The detection item selection module selects the speed, displacement and trajectory during the test through the control module according to the selected item type;
[0027] S3: Turn on the infrared sensor on the robot, and simulate the robot collision model through the collision detection calculation uni...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More