Multi-joint robot with linear transmission
A multi-joint robot and linear transmission technology, which is applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of large load inertia, low work efficiency, and bulky structure of the whole machine, and achieve improved efficiency, simple structure, and wide range of motion. wide effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
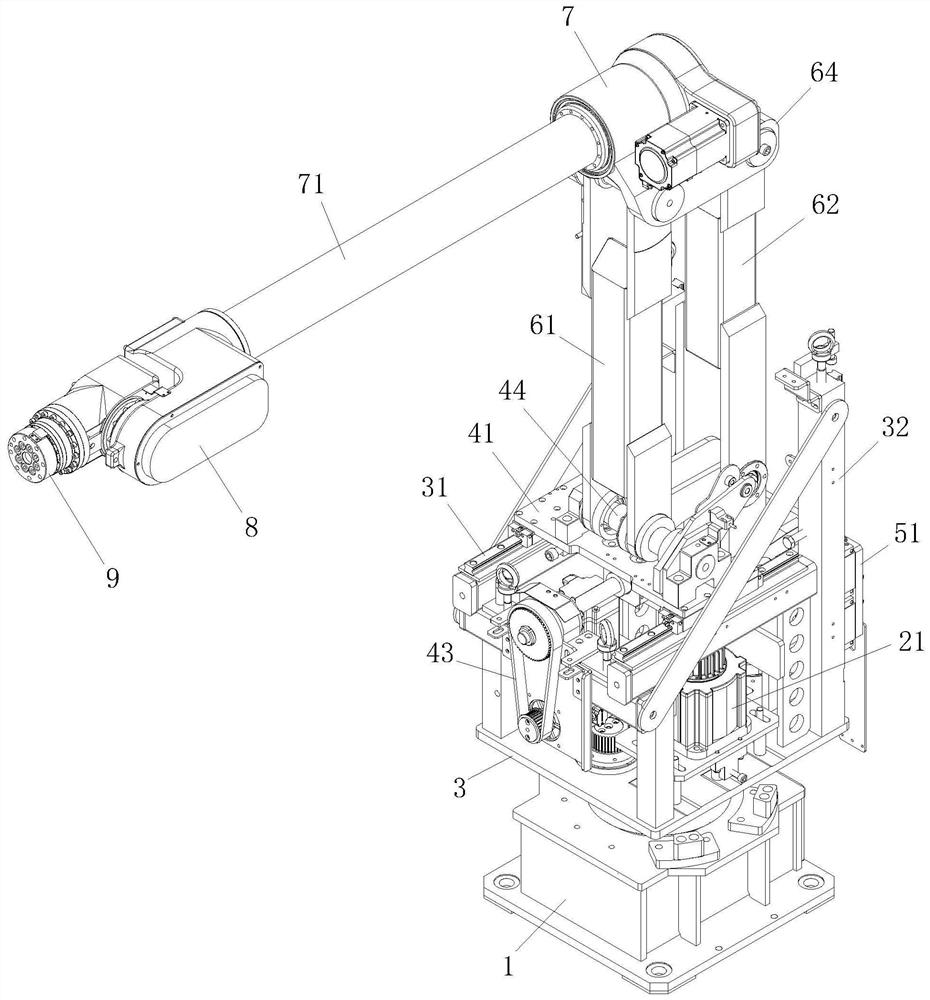
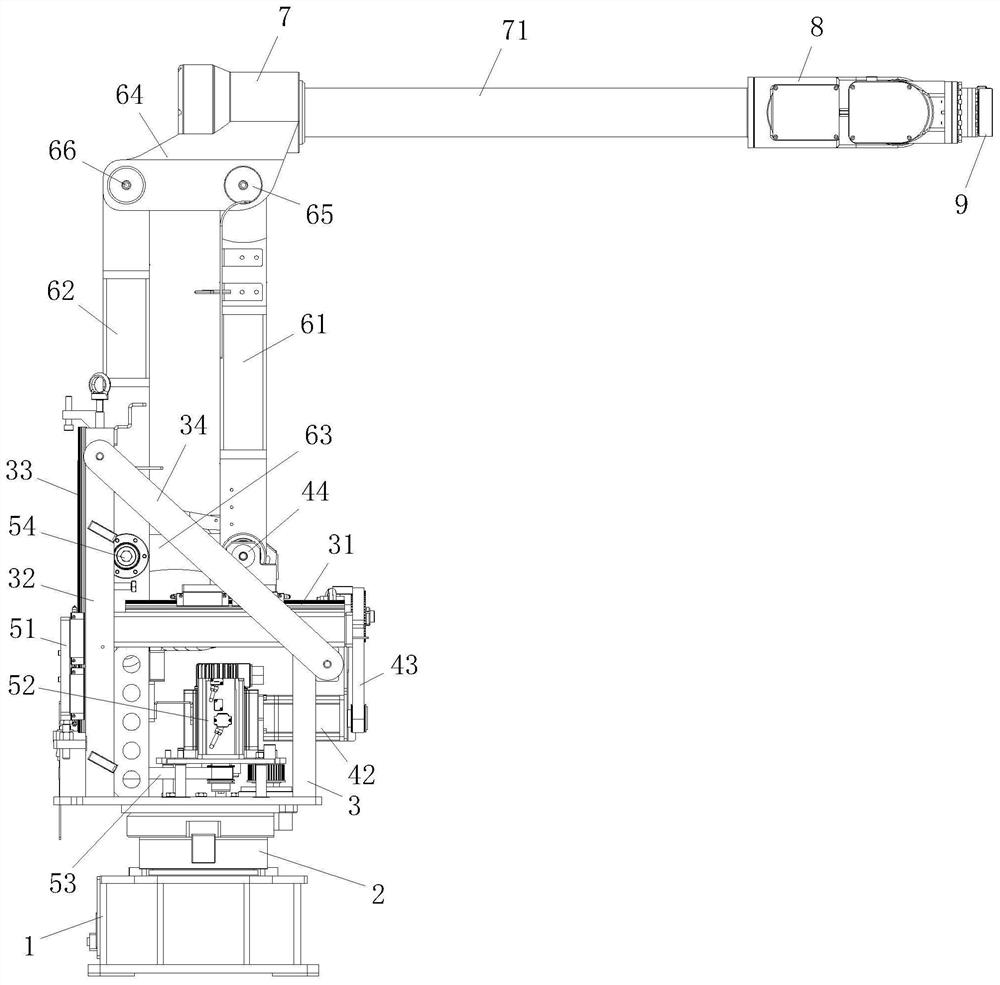
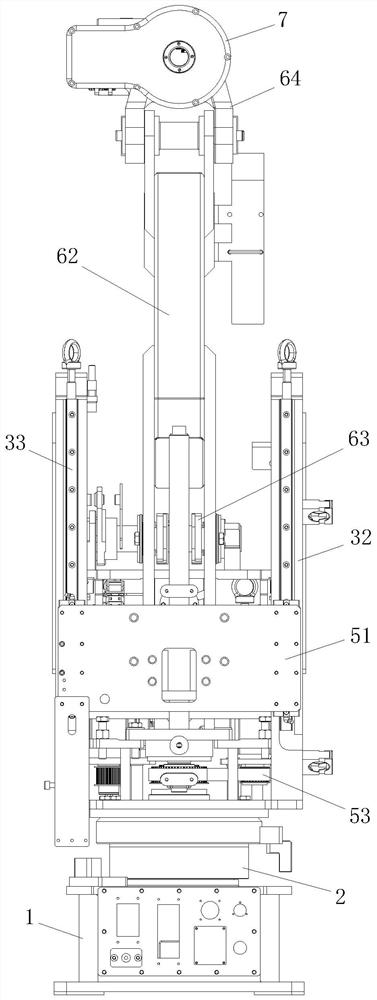
[0021] In this example, refer to Figure 1-Figure 4 , the multi-joint robot with linear transmission includes a base 1, a first axis rotary joint 2, a second axis, a third axis, a fourth axis 7 and an end axis 9, and the first axis rotary joint 2 is installed on the base 1 above, the other axes are respectively connected with the previous axis to form a robot structure with multi-axis degrees of freedom, with five or six axes as the most common structure; the support frame 3 is installed on the first axis rotary joint 2, and the second axis and the third axis are linear transmission structures respectively, and both are installed on the support frame 2 together, wherein, the second axis is a horizontal linear transmission structure, and the third axis is a vertical linear transmission structure; the fourth axis 7 and the second axis and The movable joint connection structure is formed by the hinged connecting arm between the third axes, the fourth axis 7 can move back and fort...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com