

Multi-clamp mechanical arm disordered grabbing method and system
A robotic arm, multi-fixture technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as inability to batch batch objects, and achieve the effect of efficient processing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
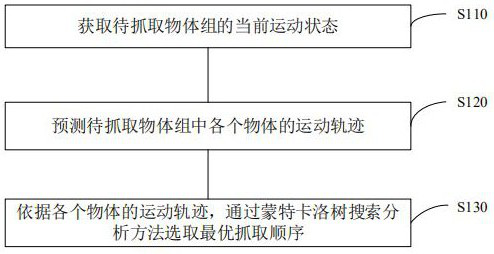
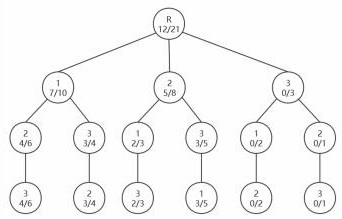
[0052] Such as figure 1 As shown, Embodiment 1 provides a disorderly grasping method of a multi-gripper robotic arm. By predicting and simulating the motion state, and selecting the optimal grasping order through the Monte Carlo tree search analysis method, a better solution can be obtained in a short time, so that the task of grasping multiple objects can be handled efficiently.
[0053] Specifically, the disorderly grasping method of the multi-gripper robotic arm includes:
[0054] S110: Obtain the current motion state of the object group to be grasped.
[0055] Specifically, step S110 includes the following steps:
[0056] S111: Collect a single frame of image to classify and recognize objects in the scene, and determine the classification of objects in the scene.
[0057] In this embodiment, the image capture is performed by the camera device attached to the robotic arm, and the objects are classified according to the pre-stored classification standards for grasping re...
Embodiment 2
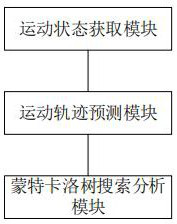
[0088] see image 3 , the present embodiment provides a multi-gripper robotic arm out-of-order grasping system, the system includes: a motion state acquisition module, a motion trajectory prediction module, and a Monte Carlo tree search and analysis module.
[0089] The motion state acquisition module is adapted to obtain the current motion state of the object group to be grasped; specifically, the motion state acquisition module is used to perform the following steps:
[0090] S111: Collect a single frame of image to classify and recognize objects in the scene, and determine the classification of objects in the scene.
[0091] In this embodiment, the image capture is performed by the camera device attached to the robotic arm, and the objects are classified according to the pre-stored classification standards for grasping requirements.
[0092] S112: Determine the number of objects to be grasped according to the object classification result.
[0093] S113: Continuously colle...
Embodiment 3
[0121] This embodiment provides a computer-readable storage medium, and at least one instruction is stored in the computer-readable storage medium. When the above-mentioned instructions are executed by a processor, the multi-gripper robotic arm disorder provided by Embodiment 1 is realized. Grab method.
[0122] The disorderly grasping method of the manipulator with multiple fixtures predicts and simulates the motion state, and selects the optimal grasping sequence through the Monte Carlo tree search analysis method, so that a better solution can be obtained in a short time, so that Efficiently handle the task of grasping multiple objects.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More