

Laser radar dynamic obstacle detection method considering wheeled robot pose estimation
A wheeled robot and dynamic obstacle technology, applied in the field of lidar obstacle detection, can solve problems such as immature dynamic obstacle recognition methods, achieve good obstacle tracking effect, accurate pose estimation, and high data processing frequency. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0078] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
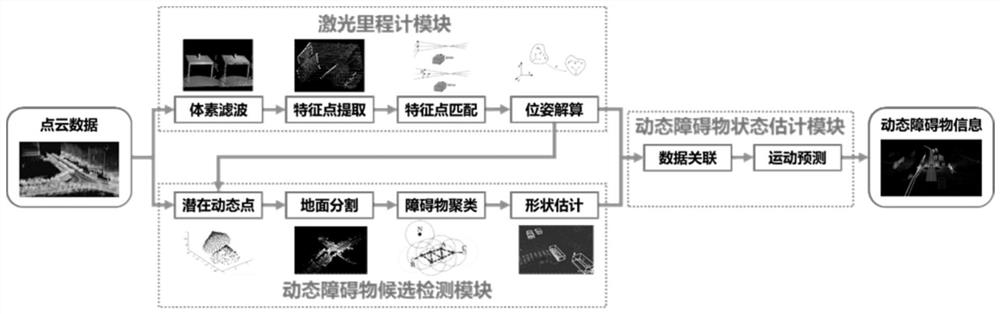
[0079] Such as figure 1 As shown, the lidar dynamic obstacle detection method considering the wheeled robot pose estimation provided by the embodiment of the present invention includes:
[0080] Step 1. According to the geometric characteristics of the laser point cloud data, the point cloud conforming to the preset curvature characteristics is extracted as the feature point, and the matching relationship of the same feature point in the point cloud data at two adjacent frames is established, and the cost function is constructed. Construct the ICP (Iterative Closest Point; Iterative Closest Point) problem using the robot pose as a variable, and use SVD (Singular Value Decomposition; Singular Value Decomposition) to iterate in the x and y two-dimensional plane solution space of the radar coordinate system until The pose converges to obtain the pose in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More