Motion control system and method based on Codesys software development position error compensation
A motion control system and error compensation technology, applied in the direction of electric controllers, controllers with specific characteristics, etc., can solve complex environments, cannot meet the needs of diversification, high-tech integration, customization, bias errors, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] It should be understood that "functional block" or "module" used herein is a method for distinguishing different components, elements, components, parts or assemblies of different levels. However, the words may be replaced by other expressions if other words can achieve the same purpose.
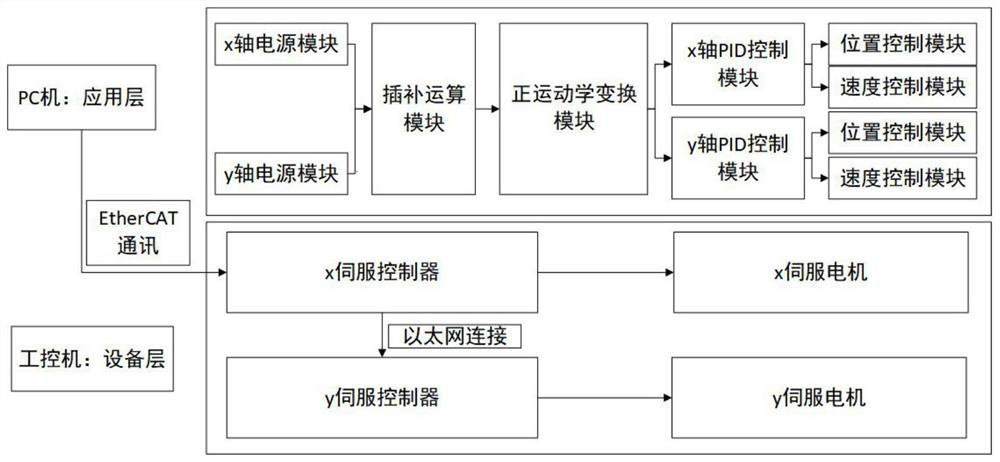
[0018] The PC runs the program, the interpolation operation module is connected to the inverse kinematics transformation module, the output signal of the inverse kinematics transformation module is used as the input signal to connect the PID control module of the two axes respectively, and the output signal of the PID control module of the x-axis is used as the input signal of the x-axis The input signal of the position control module or the speed control module, the output signal of the PID control module of the y-axis is used as the input signal of the position control module or the speed control module of the y-axis.
[0019] Add the xml description file through the bus configurati...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap