

An improved multi-rrt path planning method and agv car based on fusion prediction
A path planning and trolley technology, applied in two-dimensional position/channel control, vehicle position/route/height control, instruments, etc., can solve the problems of high redundancy, large amount of calculation, low efficiency, etc., to improve calculation Efficiency, reducing difficulty, and speeding up the effect of convergence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
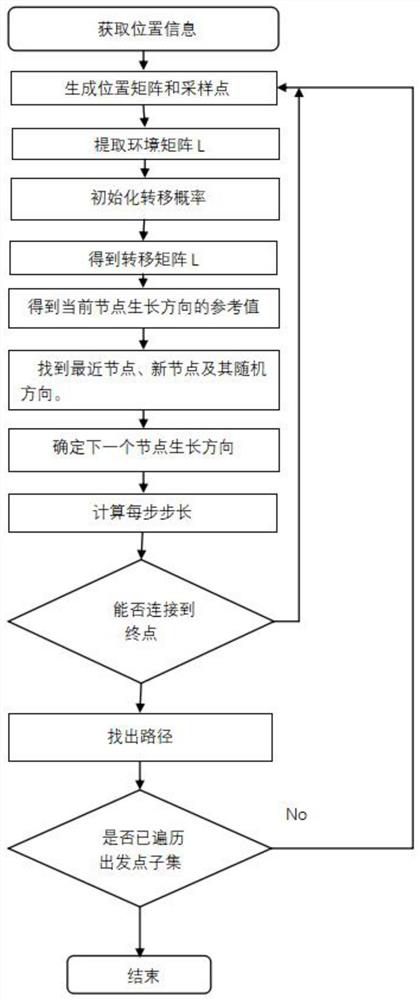
[0061] Embodiment: an improved Multi-RRT path planning method of fusion prediction, such as figure 1 shown, including the following steps:
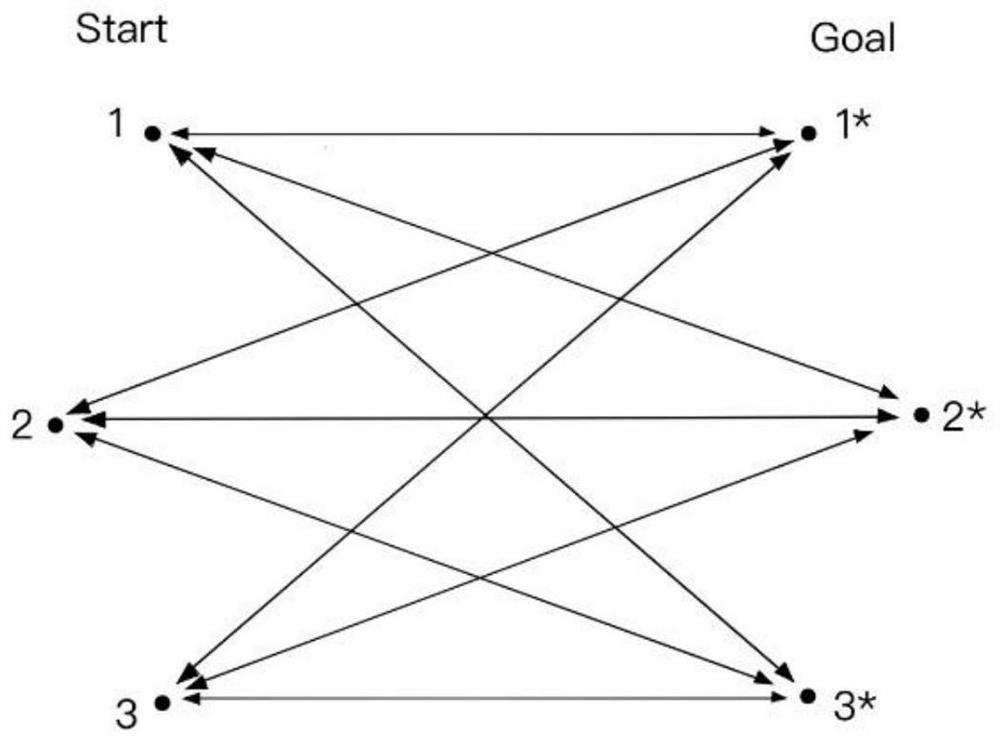
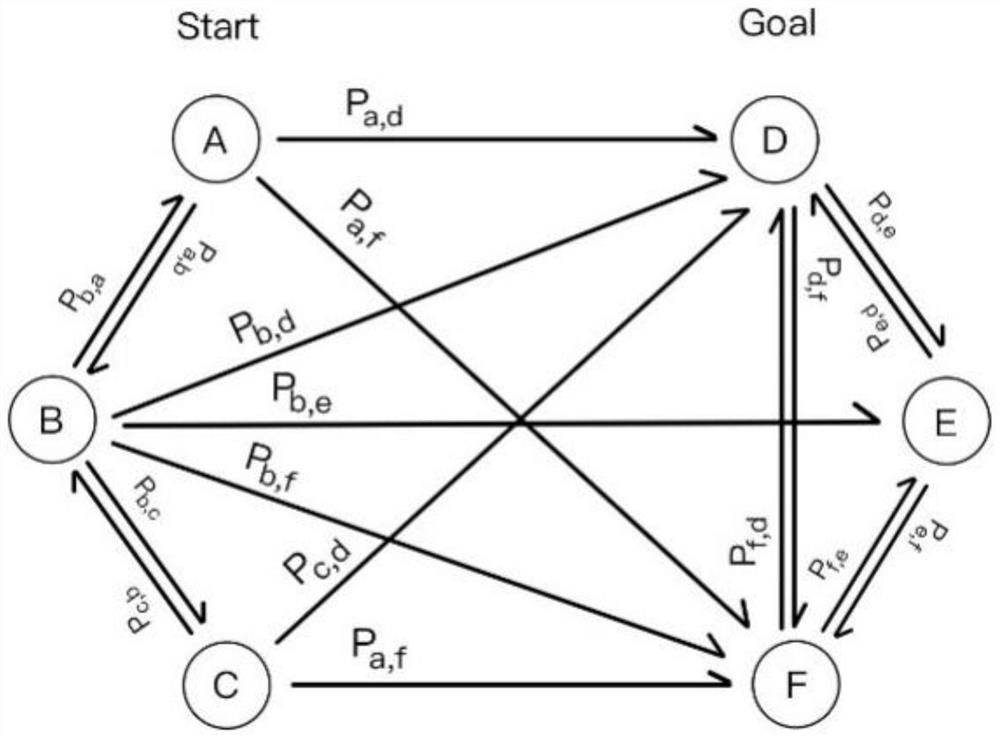
[0062] Step A: If figure 2 As shown, the position information of multiple AGV cars (intelligent logistics vehicles) and multiple target points is obtained, converted into a position matrix P, and the position information of multiple AGV cars is formed into a starting point set, and the starting point is selected from the starting point set to generate Plan the path; then regard different positions as different nodes, the possibility that the AGV car will select the next node position j at a certain position i is expressed as the transition probability between nodes, and traverse all the transition probabilities between nodes to form a transition probability matrix A;
[0063] Step B: Assuming that the matrix A is a symmetric matrix, then according to the non-negativity of the probability, the matrix A is a symmetric positive definite m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More