Recovery torque control method and system and vehicle
A torque control and vehicle technology, which is applied in the direction of control drive, control device, vehicle components, etc., can solve the problems of vehicle running forward, sliding energy recovery and exit, energy recovery intensity is high, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The specific embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
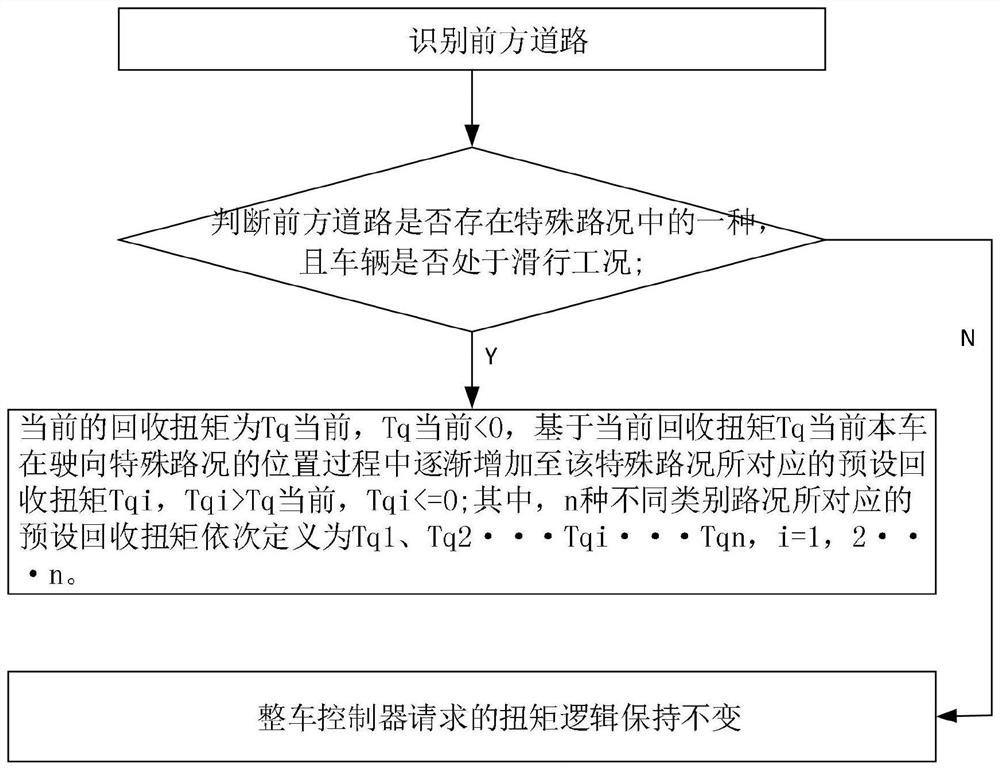
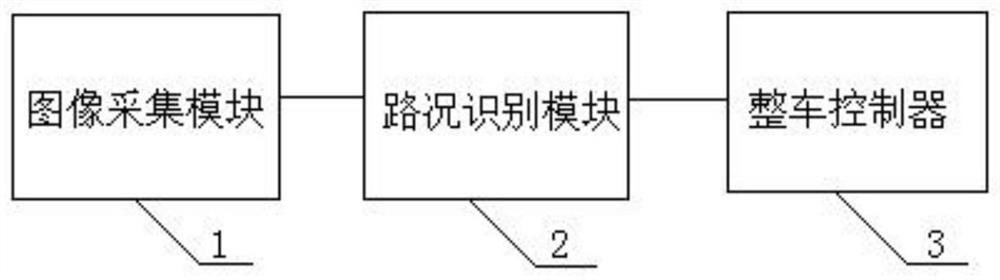
[0034] see figure 1 with figure 2 As shown, this embodiment discloses a recovery torque control method, the steps include:
[0035] Identify the road ahead and judge whether there is one of the special road conditions on the road ahead. The special road conditions include n different types of road conditions. Among them, the special road conditions represent the road surface that will cause abnormal behavior of the driving vehicle; turn behavior.
[0036] Determine whether the vehicle is in a sliding condition;
[0037] If it is recognized that there is a special road condition on the road ahead and it is in a sliding condition, the current recovery torque is Tq 当前 ,Tq 当前 当前 The vehicle gradually increases to the preset recovery torque Tq corresponding to the special road condition during the process of driving to the position of the s...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap