

Unmanned aerial vehicle autonomous obstacle avoidance method and system based on single-line laser radar
A single-line laser radar, laser radar technology, applied in radio wave measurement system, electromagnetic wave re-radiation, utilization of re-radiation and other directions, can solve the problem of not realizing single-line laser load and UAV communication, unable to single-line laser control data transmission and other problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
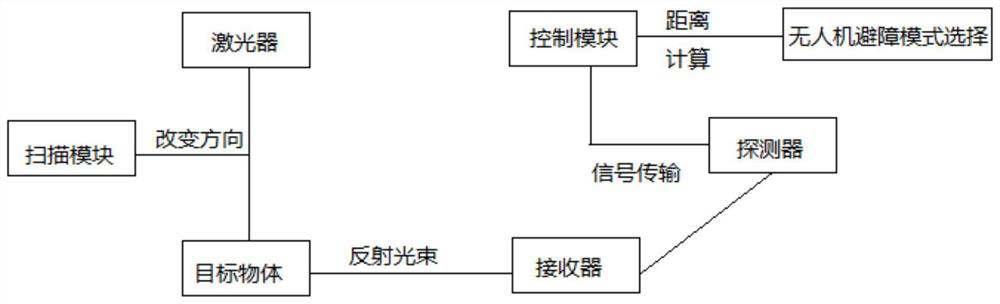
[0041] see figure 1 , is a flow chart of the autonomous obstacle avoidance method for the single-line laser radar UAV according to the embodiment of the present invention;
[0042] An autonomous obstacle avoidance method for a drone based on a single-line laser radar according to an embodiment of the present invention includes:
[0043] S1 obtains the laser beam emitted by the lidar, changes the spatial projection direction of the laser beam through the scanning module, and emits the laser beam to the target object;
[0044] S2 receiving the light signal reflected by the target object by the receiving module, and sending it to the detector;
[0045] S3: The detector transmits the optical signal to the controller for data processing, obtains the distance information and angle information from the target object to the laser radar, and compares the distance information with the set threshold distance;
[0046] S4 If the distance information is less than the set threshold distan...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More