

Obstacle detection method for overhead transmission line inspection robot
A technology for overhead transmission lines and inspection robots, applied in the field of machine vision, can solve the problems of complex network model computing system, inability to recognize abnormal obstacles, and single type of obstacle recognition, avoiding long-term running reasoning, good robustness The effect of ensuring the detection accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] In the following description, numerous specific details are given in order to provide a more thorough understanding of the present invention. It will be apparent, however, to one skilled in the art that the present invention may be practiced without one or more of these details. In other examples, some technical features known in the art are not described in order to avoid confusion with the present invention.
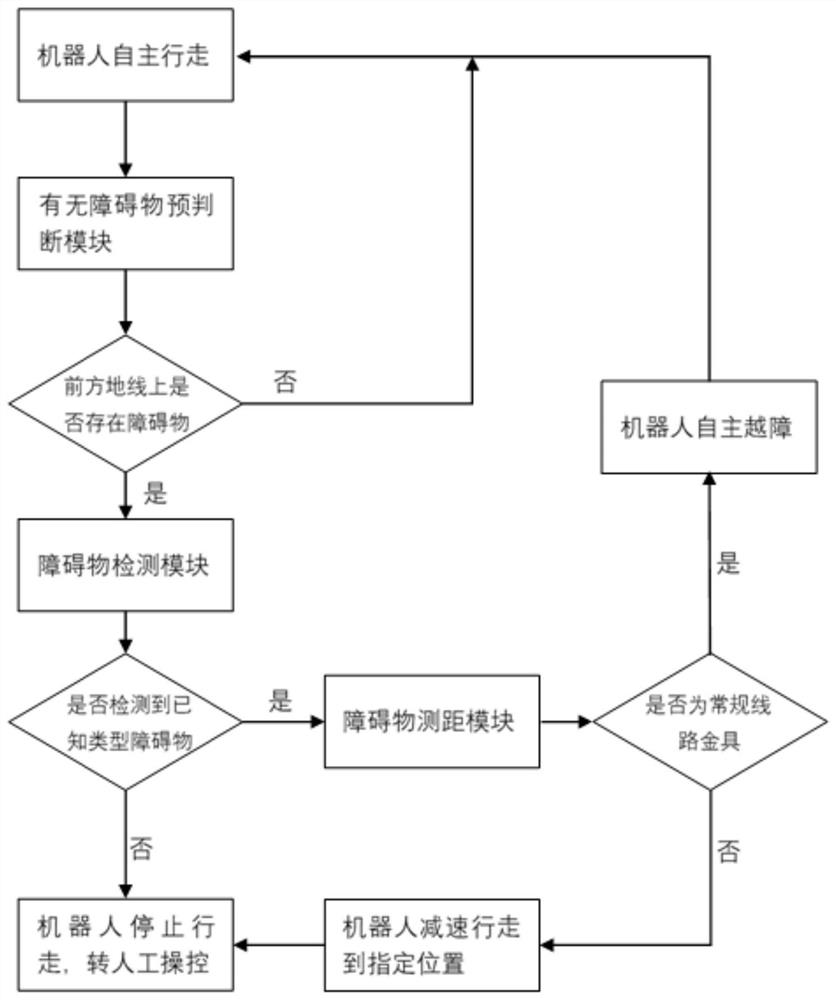
[0043] In order to realize continuous autonomous inspection, the robot needs to identify obstacles on the walking route in advance, and perform corresponding obstacle-crossing actions according to the obstacle type and position information. Conventional obstacles on the ground include line fittings such as anti-vibration hammers and wire clips. The reliability of obstacle detection is crucial to the safe operation of the robot. Wrong judgments will cause huge safety hazards. The applicant found that the existing visual The inspection robot based on the identifi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More