

Multi-feature fusion IGV positioning and mapping method based on 3D laser radar
A technology of multi-feature fusion and laser radar, applied in 2D image generation, image enhancement, image analysis, etc., can solve problems such as hidden safety hazards, increased economic costs, difficult high-precision positioning and mapping, etc., to achieve stability and speed The effect of operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
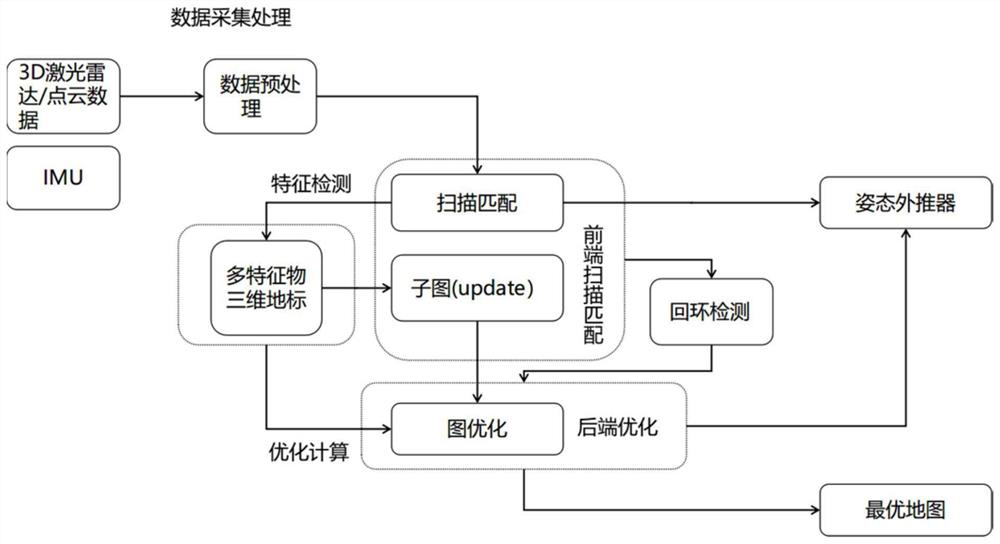
[0052] The execution steps of the method will be further described in detail below with reference to the accompanying drawings, but the protection scope of the present invention is not limited to the following description.
[0053] Such as figure 1 As shown, the present invention provides a multi-feature fusion IGV positioning and mapping method based on 3D lidar, which enables IGV to achieve high-precision positioning and mapping in complex environments. Specifically include the following steps:
[0054] S1: Divide the entire map scene into several cubes of similar size, assign a certain probability value to each cube, and assign a probability value of 1 to the three-dimensional landmark area, and construct a three-dimensional occupancy grid map. In the grid map, record laser hit as hit and miss as miss, use p(s=1) to represent the probability of its miss, use p(s=0) to represent the probability of its hit, and the difference between the two and 1.
[0055] Use the ratio o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More