

General calculation method for inverse kinematics of serial robots
A technology of inverse kinematics and robotics, which is applied in the general solution field of inverse kinematics of series robots, and can solve problems such as difficulty in simultaneously ensuring calculation time and accuracy of results, difficulty in automatically solving kinematics, and complicated solution process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention is described in more detail below in conjunction with accompanying drawing example:
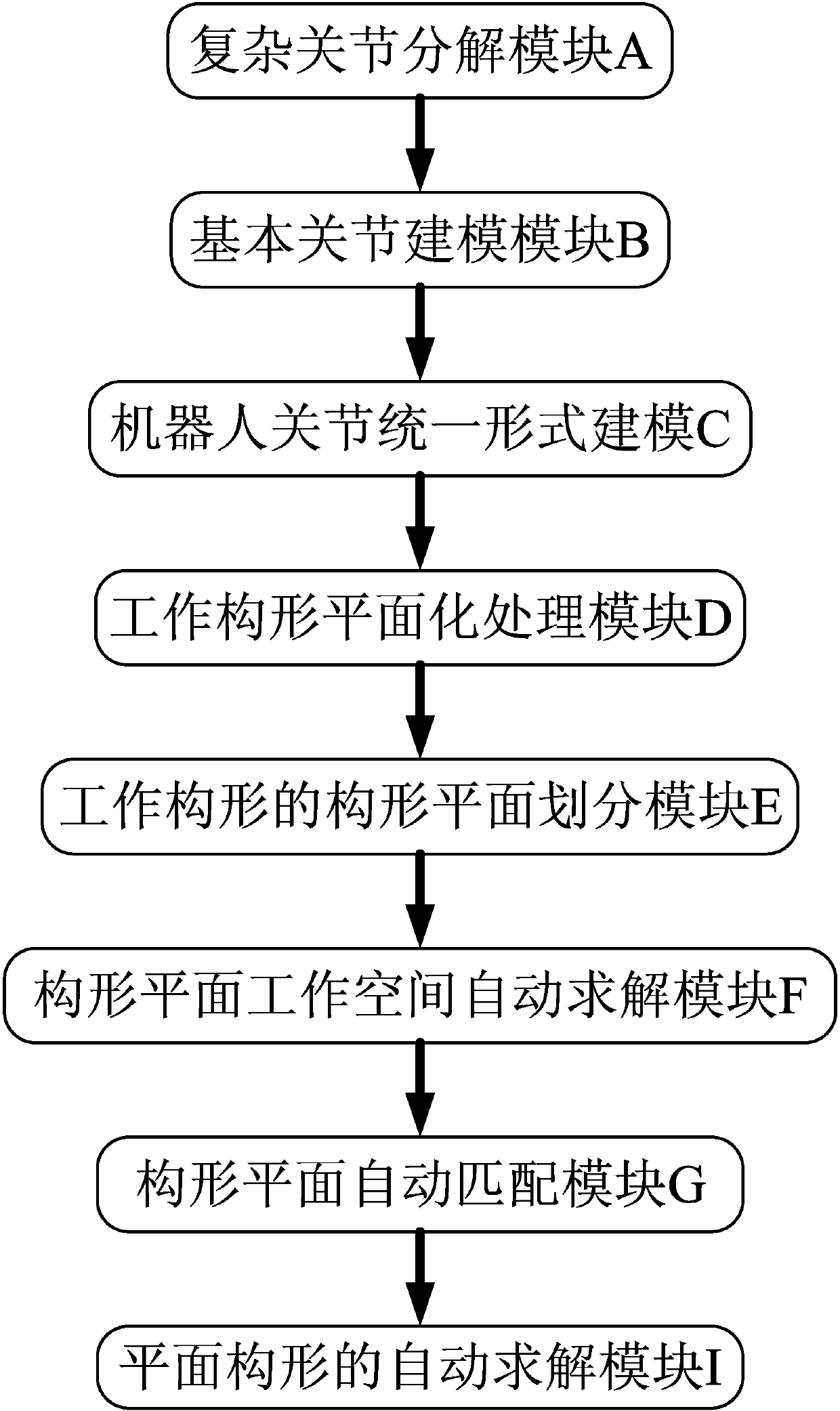
[0036] to combine figure 1 , the present invention consists of a complex joint decomposition module A, a basic joint modeling module B, a robot joint unified form modeling C, a working configuration planarization processing module D, a working configuration configuration plane division module E, and a configuration plane workspace It consists of automatic solution module F, configuration plane automatic matching module G, and plane configuration automatic solution module I.
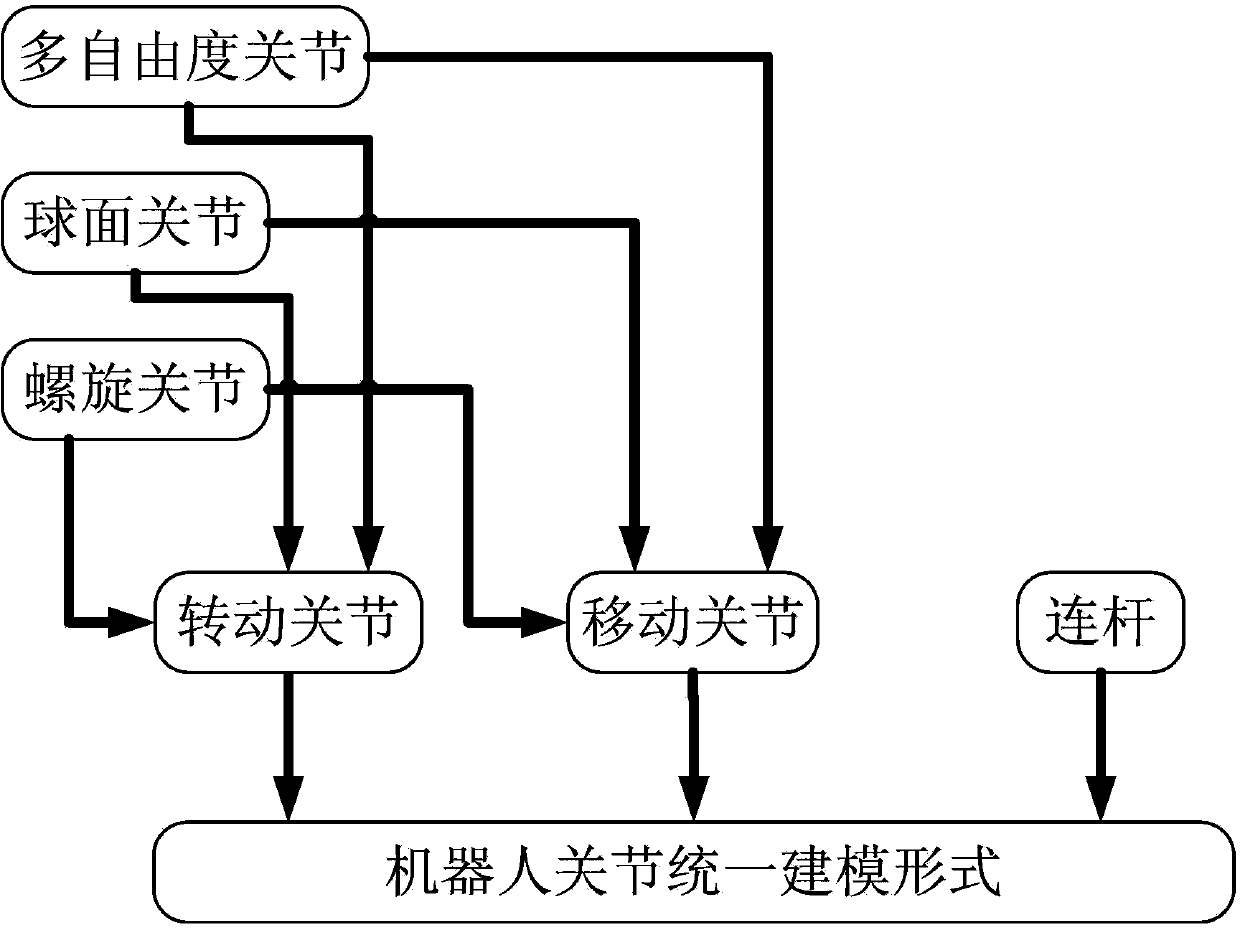
[0037] to combine figure 2 , for the automatic modeling method of the robot joints, according to the inherent characteristics of the basic joints of the robot, based on the research on the modeling methods of the robot joints at home and abroad, a robot with a unified mathematical model expression based on the single-degree-of-freedom robot joints is proposed Joint modeling method. In ord...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More