Semi-submersible drilling platform casing pipe hole entering method
A drilling platform and semi-submersible technology, applied in the direction of drilling equipment and methods, underwater drilling, drilling equipment, etc., can solve the problems of casing running inclination, high requirements for drilling pressure control, unsuitable injection method, etc., to achieve Improved accuracy, reduced operating costs, and high versatility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
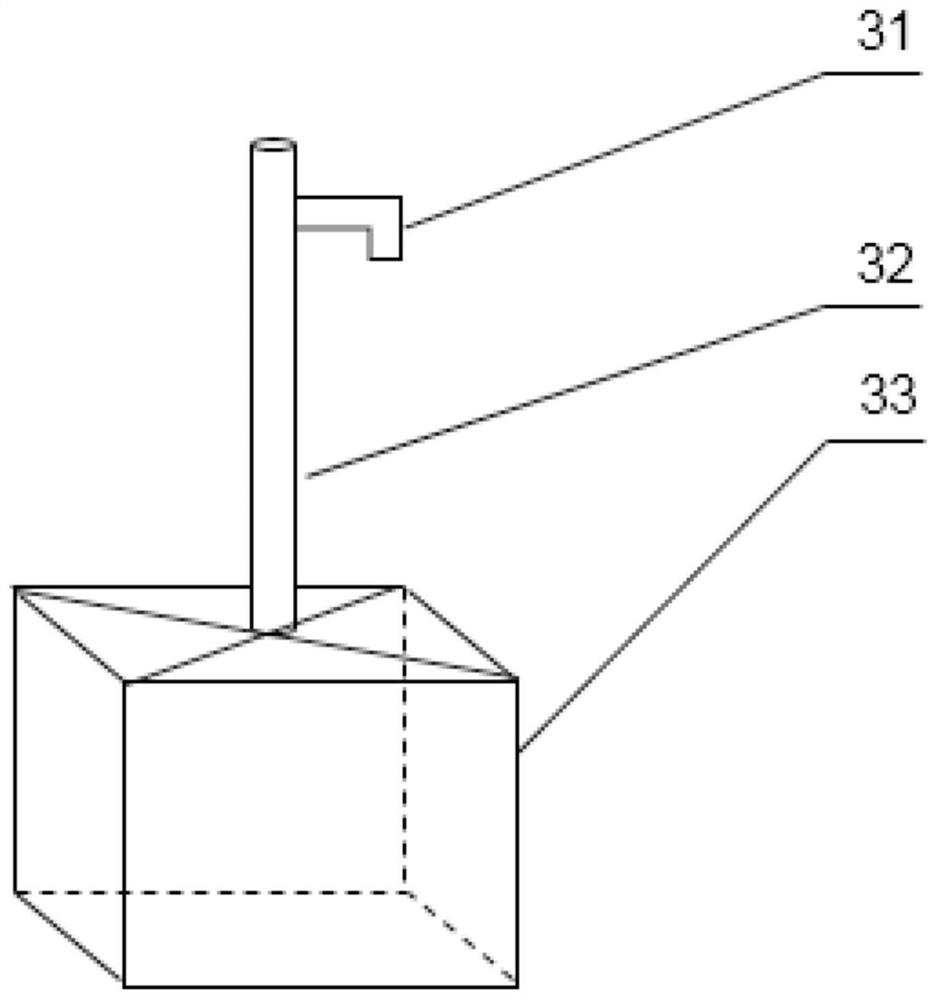
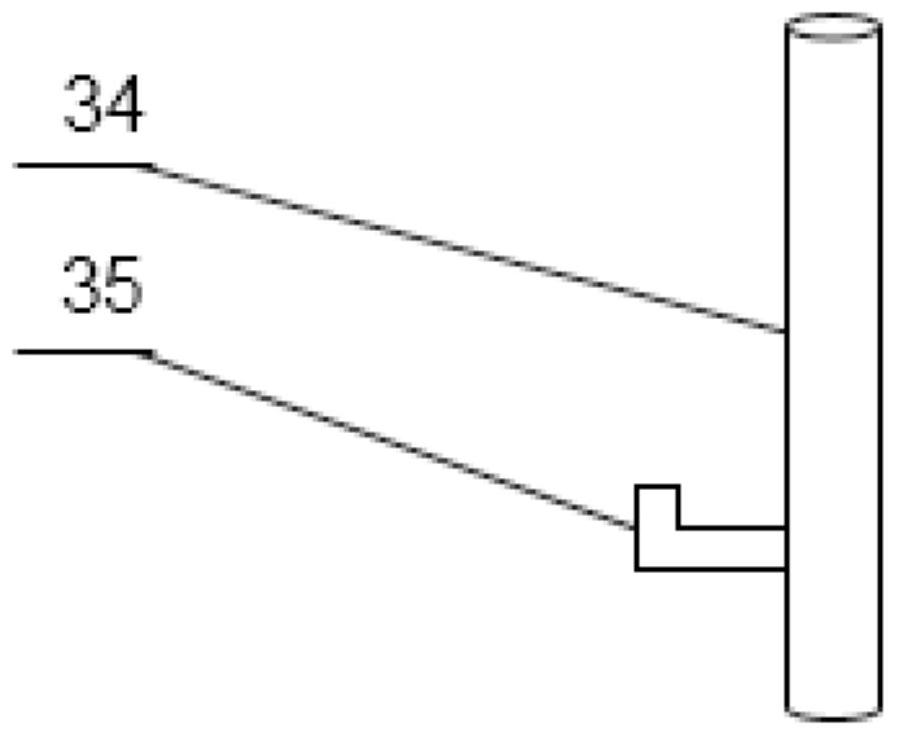
[0040] Such as figure 1 and figure 2 Shown, a kind of semi-submersible drilling platform casing drilling method comprises the following steps:
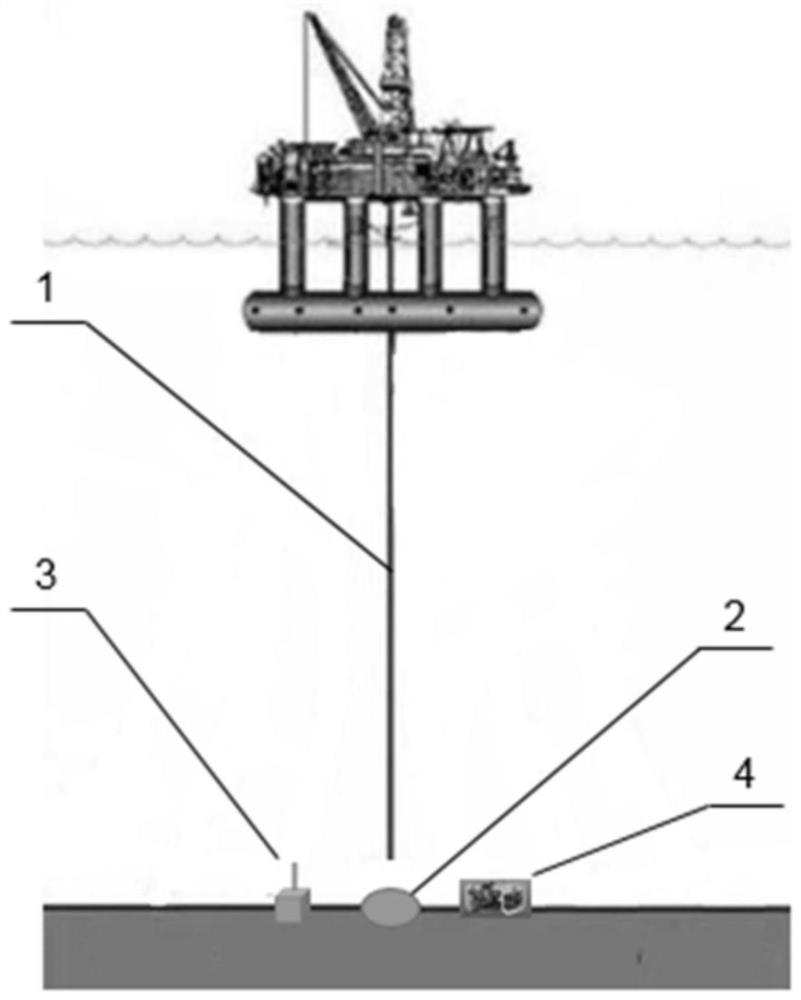
[0041] S10: Launch a beacon 3 at a distance of 5 meters from the target drilling position; the distance between the beacon 3 and the target drilling position is too small, and the position of the semi-submersible drilling platform affected by the waves will shift during the subsequent drilling process, As a result, the drill bit hits the beacon 3; when the distance between the beacon 3 and the target drilling position is too large, the detection accuracy will decrease. At the same time, the beacon 3 is fixed on the seabed mud to prevent the position of the beacon 3 being affected by the seabed current from shifting.
[0042] S20: The remote control ROV4 moves to a place 5 meters away from the target drilling position and stands by; the ROV4 is a remote operated unmanned submersible (Remote Operated Vehicle, ROV), which is a type of...
Embodiment 2
[0064] This embodiment is similar to Embodiment 1, the difference is that the step S10 in this embodiment: the beacon 3 is placed at a distance of 3 meters from the target drilling position; the step S20: the remote control ROV4 moves to a distance from the target drilling position Standby at 3 meters;
Embodiment 3
[0066] This embodiment is similar to Embodiment 1, the difference is that the step S10 in this embodiment: the beacon 3 is placed at a distance of 10 meters from the target drilling position; the step S20: the remote control ROV4 moves to a distance from the target drilling position Standby at 10 meters;
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com