Robot high-performance track automatic generation method combined with multistage optimization model
An optimization model and automatic generation technology, applied in artificial life, calculation model, gene model, etc., can solve the problems of not being able to give full play to the robot's motion performance, not being able to guarantee the comprehensive performance requirements of the trajectory, and algorithm versatility and efficiency. Large global optimization search ability, avoiding motion parameter setting problems, and improving the effect of rapid convergence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
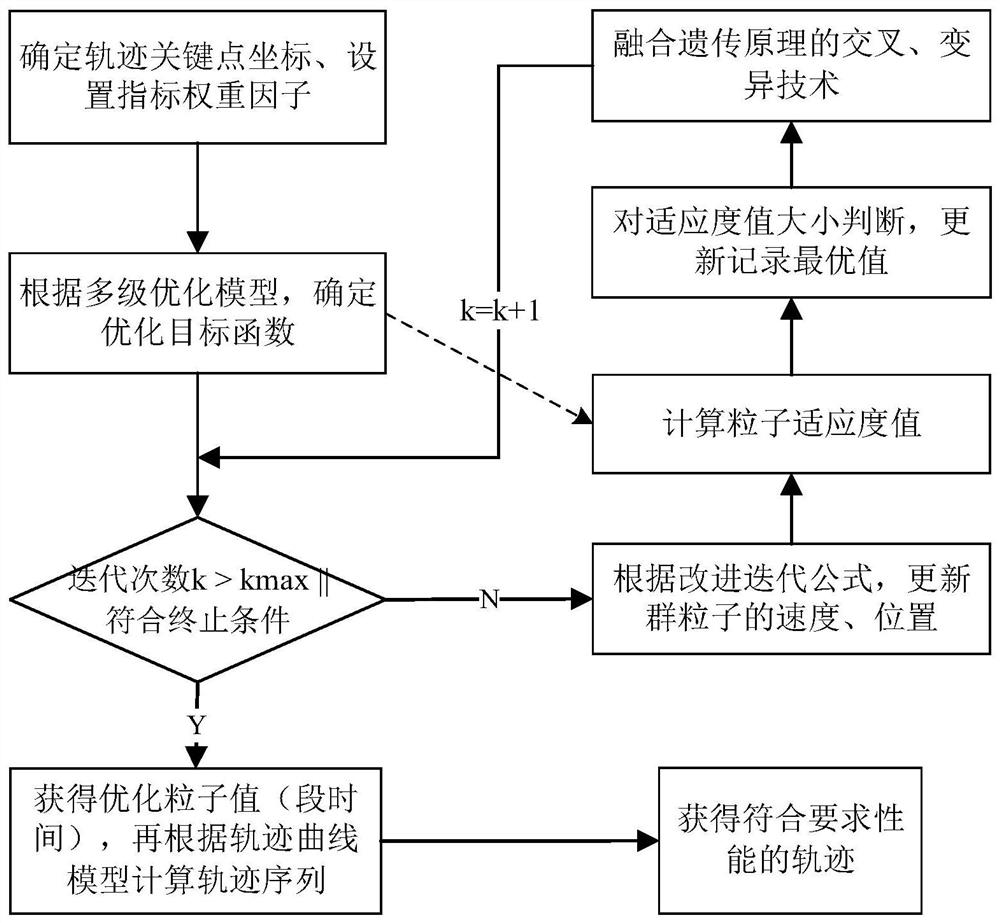
[0060] Such as figure 1 As shown, a method for automatic generation of high-performance trajectory of a robot combined with a multi-level optimization model, the method includes:
[0061] S1. Determine the coordinates of the key points of the trajectory and the trajectory curve model between two adjacent key points of the trajectory;
[0062] The coordinates of the key points of the trajectory are the coordinates of all the key points that the user needs to ensure that the trajectory passes through. This information is the minimum amount of information that the user needs to specify to complete the trajectory planning. For point-to-point tasks, it is the starting and ending positions; for n+1 points Continuous movement, that is, the position of n+1 points. In addition, in order to ensure the smooth movement of the robot on the optimized trajectory, this trajectory model chooses a quintic spline curve, which can effectively ensure the smooth speed and acceleration between mult...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com