Object digital-to-analog conversion method and device, equipment and storage medium
A conversion method and object technology, applied in the point cloud field, can solve problems such as the inability to effectively improve the accuracy of point cloud information and poor quality of point cloud, and achieve the effect of improving accuracy and point cloud quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
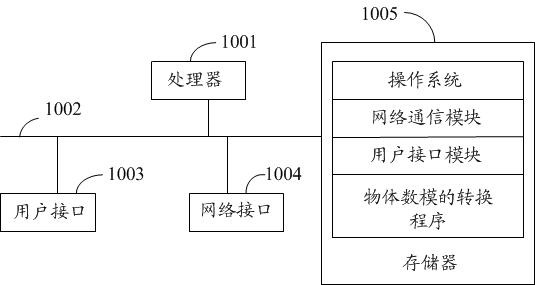
[0053] refer to figure 1 , figure 1 It is a schematic structural diagram of an object digital-to-analog conversion device in the hardware operating environment involved in the solution of the embodiment of the present invention.
[0054] Such as figure 1 As shown, the object digital-to-analog conversion device may include: a processor 1001 , such as a central processing unit (Central Processing Unit, CPU), a communication bus 1002 , a user interface 1003 , a network interface 1004 , and a memory 1005 . Wherein, the communication bus 1002 is used to realize connection and communication between these components. The user interface 1003 may include a display screen (Display), an input unit such as a keyboard (Keyboard), and the optional user interface 1003 may also include a standard wired interface and a wireless int...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



