[0010] First, traditional discrete airborne LiDAR systems only
record the first and last echoes reflected by ground objects, while multi-echo systems record up to 4 or 5 echoes. Both systems can only provide users with The three-dimensional point coordinates and related intensity information are used for the classification of ground objects, three-dimensional reconstruction of cities, and forest evaluation for geometric information. Only the geometric information of point clouds is used, or at most intensity information is added. Limitations;
processing full waveform data can not only extract parameters that reflect the vertical structure and physical characteristics of ground objects, but also generate 3D point clouds with higher density and higher precision, which is comparable to the discrete point
cloud data acquired by multi-echo airborne LiDAR Compared with the waveform data of full-waveform airborne LiDAR, it can provide more target information, but it also puts forward higher requirements for the analysis and
information extraction of full-waveform data, but the existing technology cannot quickly and accurately extract the waveform decomposition Parameters, accurate point cloud results cannot be obtained in subsequent
processing;
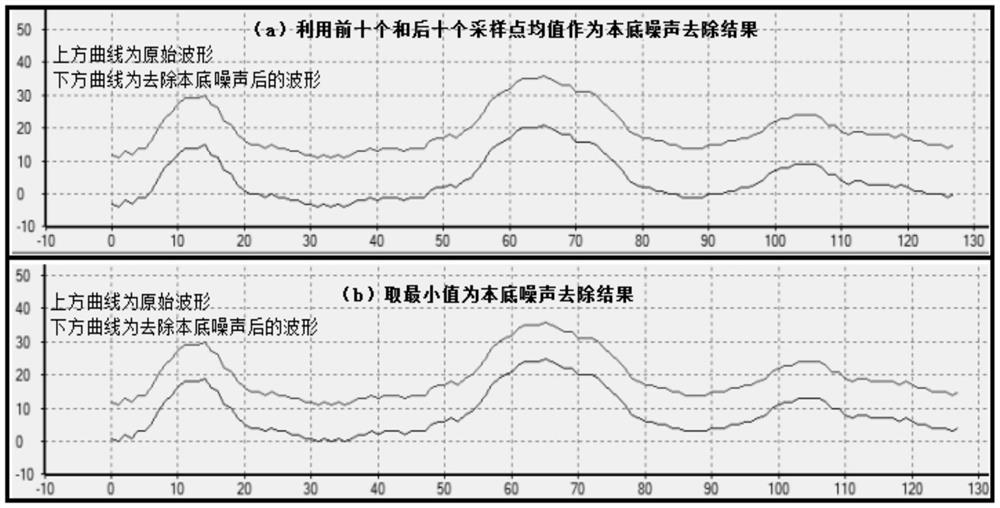
[0011] Second, for the removal of the
background noise of the LiDAR waveform data, the existing technology mainly regards the ten sampling points before and after the waveform as data without ground echo information, and removes the mean value as the
background noise. This method performs large-spot LiDAR The removal of the
background noise is feasible, but the
flight altitude of the small-spot airborne LiDAR is low, and the number of echo samples is small. The first ten and last ten sampling clocks may contain ground echo signals. If this mean value is directly used as the background
noise, Will produce errors that affect subsequent processing
When the number of complex echoes on the ground is large, the part exceeding the
system sampling number will not be recorded, and the sampling points at the end of waveform
digitization contain ground echo information; when there are tall ground objects, the sampling points at the beginning of waveform
digitization also contain For the echo data of ground objects, if the mean value of these points is simply removed from the original waveform as the background
noise, the removed background
noise will be greater than the actual value, and some weaker ground echoes will be mistaken for noise, resulting in The waveform after denoising does not match the actual one, which affects the final decomposition result, and then affects the calculation and classification results of the point cloud coordinates. The existing technology lacks a method to remove the background noise of LiDAR
full waveform;
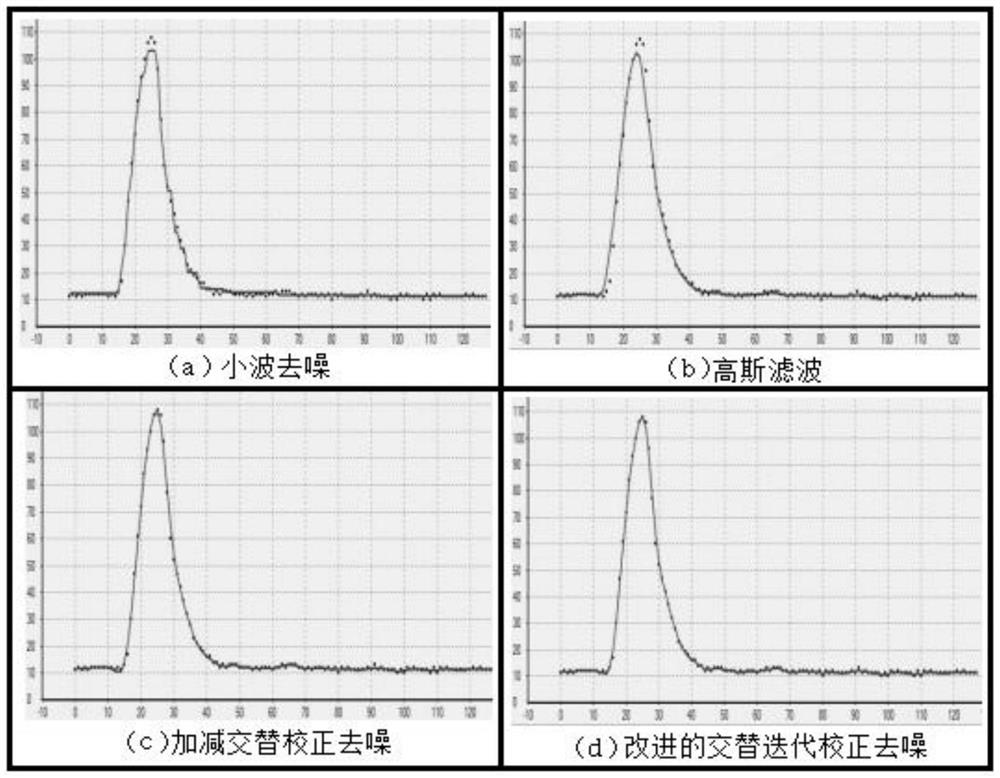
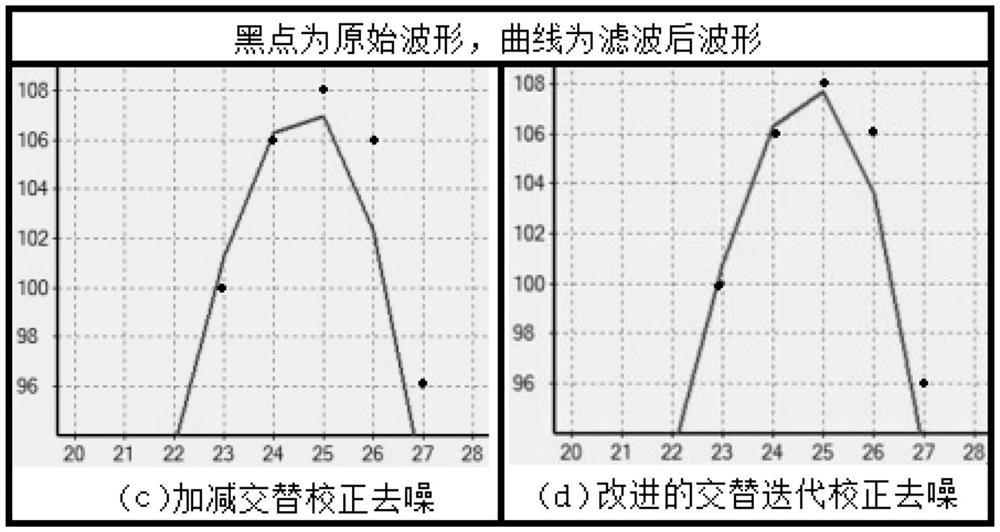
[0012] Third, the noise distribution in the LiDAR
signal is very complex. It is unrealistic to denoise the
signal only by selecting a
cut-off frequency with a traditional
digital filter. Seriously,
wavelet multi-scale decomposition and reconstruction requires a large amount of calculation. If it is used for denoising thousands of LiDAR echoes, it will consume too much time and space. As for denoising in the
spatial domain, if you want to obtain a better denoising effect, The prior knowledge of the LiDAR
signal should be added to the training of the
support vector machine. The LiDAR waveform is not a superposition of
Gaussian distribution, and the denoising result is not ideal. The traditional image space domain processing and filtering algorithm does not need the prior knowledge of the waveform, but these algorithms are in While denoising, the waveform will be distorted. The existing technology lacks a method to remove the
random noise of the LiDAR full waveform;
[0013] Fourth, after estimating the number of sub-waveforms and their initial values of waveform eigenfactors, it is necessary to optimize the initial value of the estimated eigenfactors so that the
Gaussian wave fitted by the sub-waveforms is closest to the original waveform data, and the airborne LiDAR full-waveform data The waveform
decomposition problem is a multi-dimensional
nonlinear optimization problem. The algorithms commonly used to solve such problems include
gradient method, quasi-Newton method, LM algorithm, and EM algorithm. The LM algorithm overcomes the Gauss-Newton algorithm and the search fails when the Jacobian matrix is a non-column matrix. problem, but the LM algorithm is easy to obtain the local optimal solution; the evolutionary method uses multi-point
parallel search, generates new individuals through
crossover and
mutation in each
iteration process, and continuously expands the search range, so the
evolutionary algorithm is easy to search for the
global optimal solution Instead of a local optimal solution; the prior art lacks a method for optimizing the eigenfactors for LiDAR full waveform decomposition



 Login to View More
Login to View More  Login to View More
Login to View More