Online learning control method of nonlinear discrete time system
A nonlinear discrete time system technology, applied in the field of online learning control, can solve problems such as easy to fall into local optimal solution, insufficient exploration of state-policy space, etc., to achieve online learning, good exploration ability, and overcome insufficient exploration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
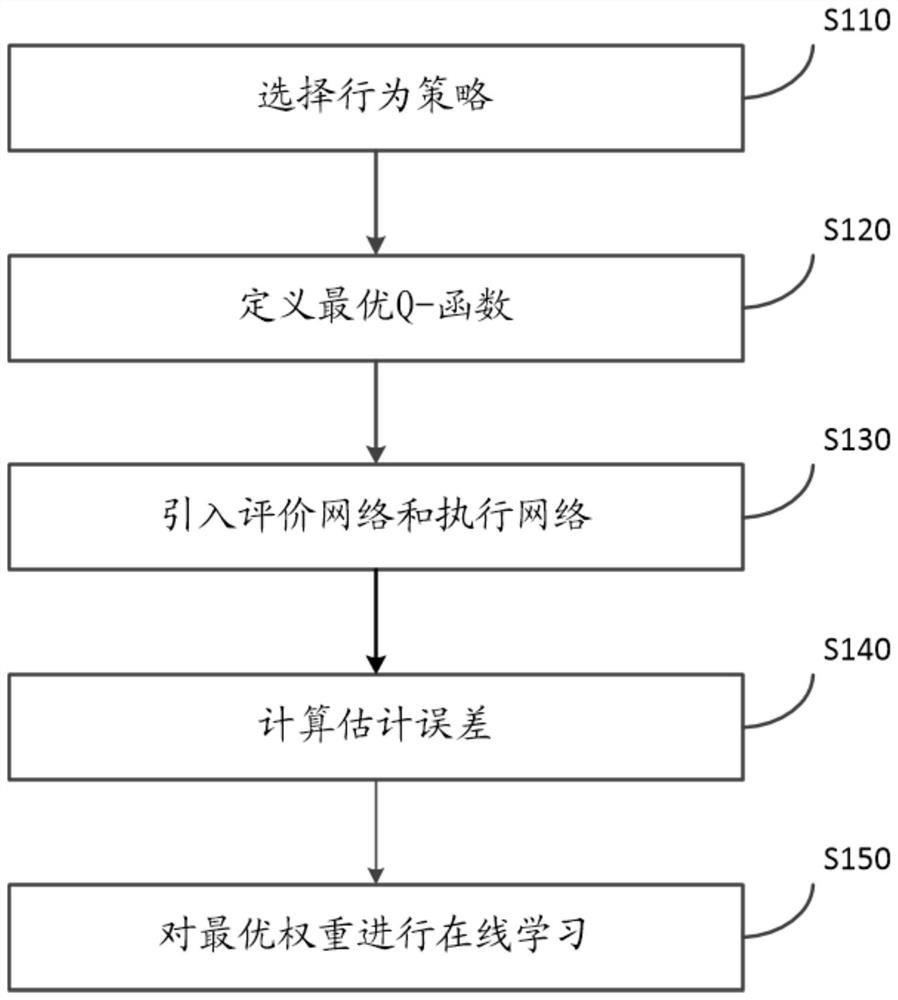
[0067] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention. In addition, it should be noted that, for the convenience of description, only some structures related to the present invention are shown in the drawings but not all structures.
[0068] The present invention first needs to consider the optimal control problem of the nonlinear discrete-time system as follows. Consider the following discrete-time system:
[0069] x k+1 =F(x k ,u k ),x 0 =x(0)
[0070] where x k is the system state, u k Enter for the system. System function F(x k ,u k ) in the tight set is Lipschitz continuous and satisfies F(0,0)=0. Assume that the system is stable on Ω, that is, there exists a control sequence u 1 ,...,u k ,…, such that x k →0. In addition, sup...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com