

Distributed optimal cooperative fault-tolerant control method based on self-adaptive dynamic planning
A dynamic programming, fault-tolerant control technology, applied in adaptive control, general control system, control/regulation system, etc., can solve problems such as difficult or impossible to obtain analytical solutions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0047] The present invention will be described in further detail below in conjunction with the accompanying drawings.
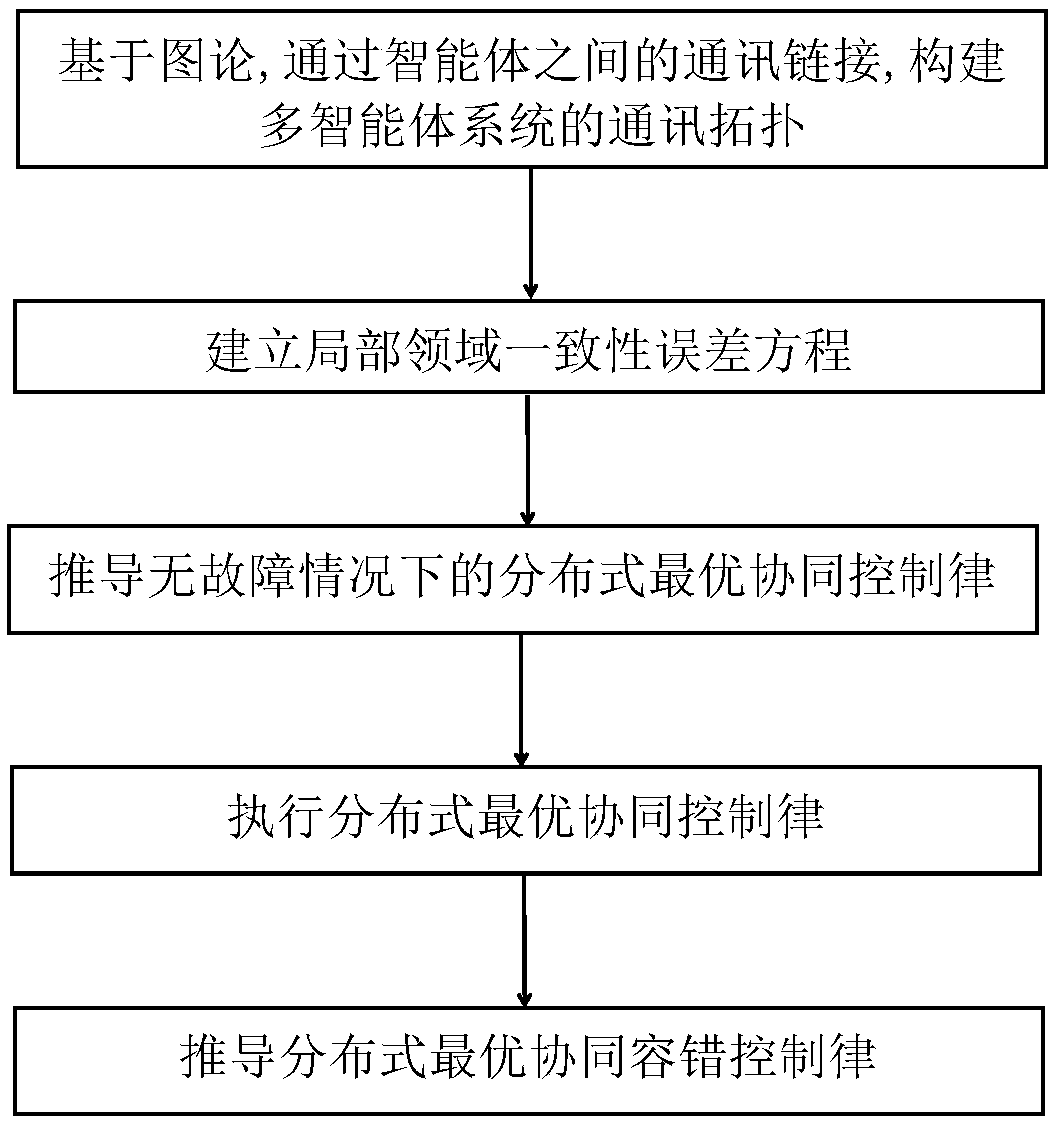
[0048] figure 1 It is a flowchart of the present invention, mainly comprising the following steps:
[0049] Step 1: Use the relevant theoretical knowledge of graph theory to establish the communication topology of the multi-agent system
[0050] Consider a multi-agent system composed of a leader agent and N follower agents, and use a directed graph G=(V,E,A) to represent the communication topology in the system. Among them, V={v0 ,v 1 ,v 2 ,...v N} represents the set of all agents, v 0 represents the leader node, v i Represents the i-th following node, i=1,...N; E={(v i ,v j ):v i ,v j ∈V} represents the set of communication links between follower nodes, and the elements in E (v i ,v j ) represents node v j Able to get node v directly i Transferred information, i,j=1,...N; weighted adjacency matrix A square matrix with dimension N×N, if (v ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More