

Rigid-flexible-liquid coupling loss reduction bionic picking elastic claw and pepper harvester
A technology of elastic teeth and loss reduction, which is applied in the field of engineering bionics, can solve the problems of reducing the impact force and collision force of pepper picking, and high damage rate, and achieve the effect of increasing freedom, reducing impact force and collision force, and improving flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
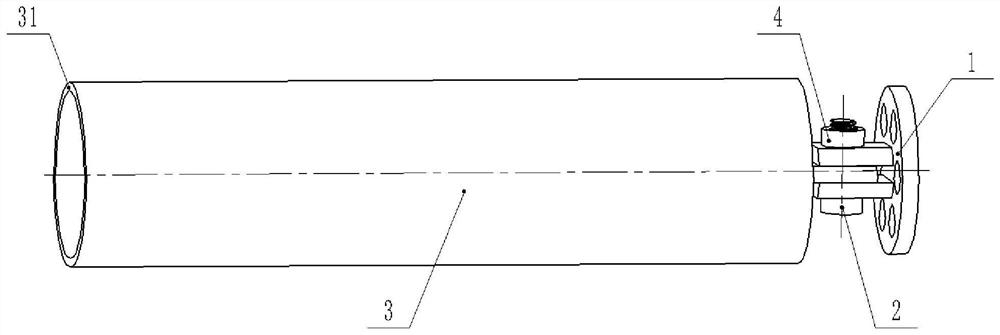
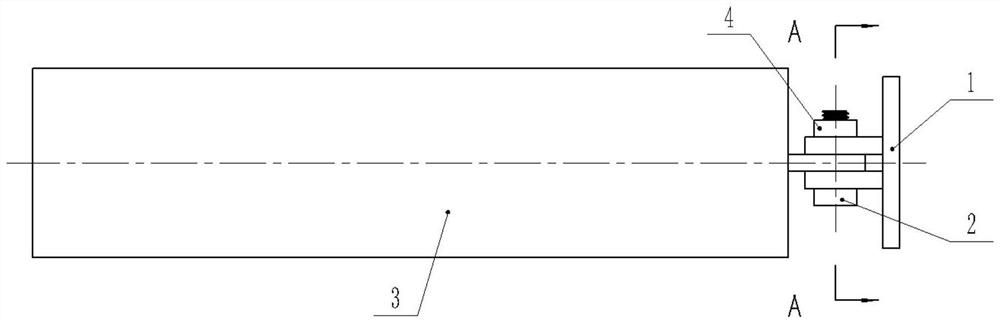
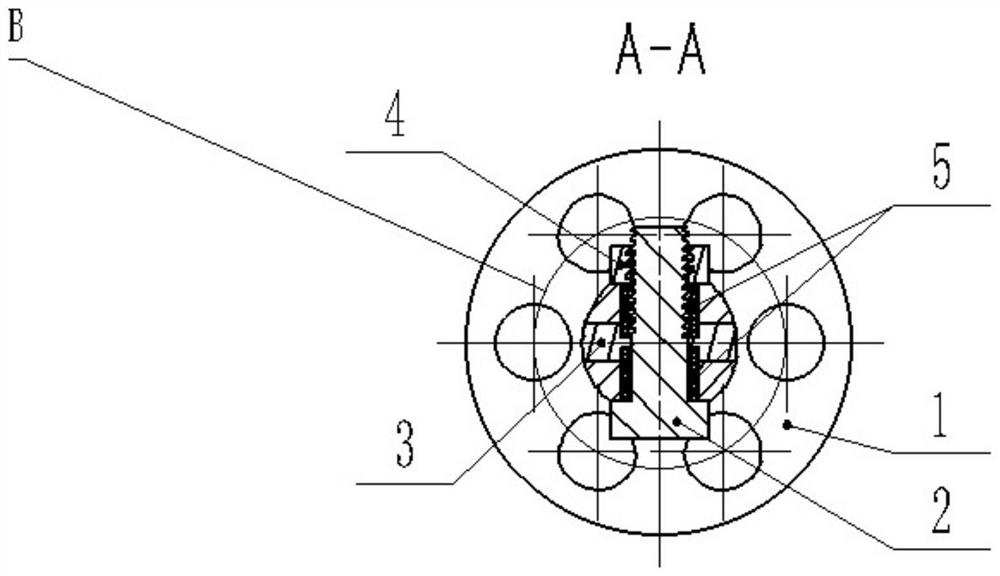
[0035] Figure 1-4 with Figure 14 Shown is a preferred embodiment of the rigid-soft-liquid coupling loss-reducing bionic picking spring tine. The rigid-soft-liquid coupling loss-reducing bionic picking spring tine includes a support 1, a bolt 2, a bionic picking Spring teeth 3, nuts 4 and torsion springs 5; bolts 2 and nuts 4 are used to connect the bionic picking spring teeth 3 to the support 1, inside the two sides where the bionic picking spring teeth 3 and the support 1 are in contact with each other A torsion spring 5 is placed respectively, and after the bolt 2 passes through the support 1, the torsion spring 5 and the bionic picking spring teeth 3, the tightness of the nut 4 is moderately adjusted to ensure that the hinge is rotatable. The bottom of the support 1 is circular and evenly distributed with multiple through holes. The main purpose is to install the rigid-soft-liquid coupling loss-reducing bionic picking spring tooth unit on the picking drum of the pepper h...
Embodiment 2
[0049] A chili harvester, comprising the rigid-soft-liquid coupling loss-reducing bionic picking spring teeth described in Embodiment 1, therefore has the beneficial effects of Embodiment 1, and will not be repeated here.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More