

Intelligent tea picking robot capable of recognizing and simulating human hands through artificial intelligence
A technology of artificial intelligence and robotics, applied in the direction of picking machines, instruments, harvesters, etc., can solve the problems of high labor intensity, labor shortage, tea quality decline, etc., to reduce labor intensity, reduce processing procedures, and improve production efficiency. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0034] The following is attached Figure 1-7 The present invention is described in further detail.
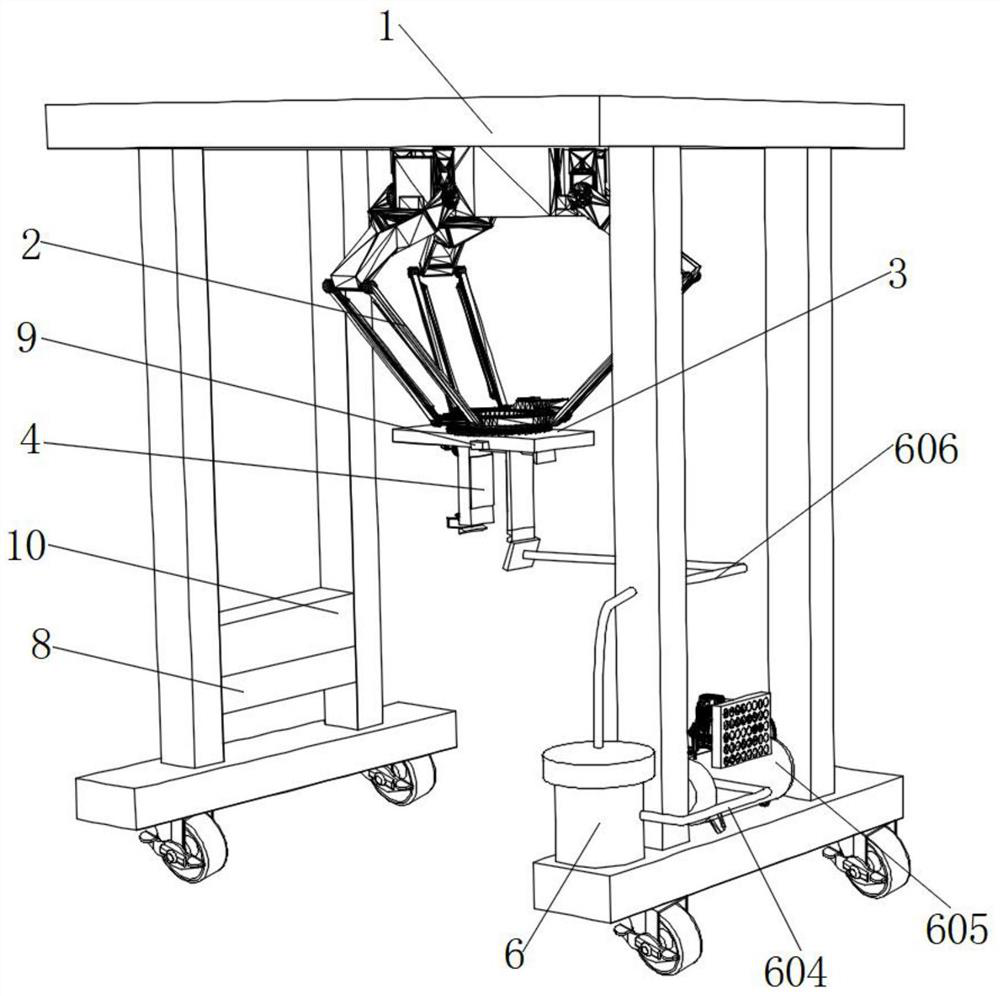
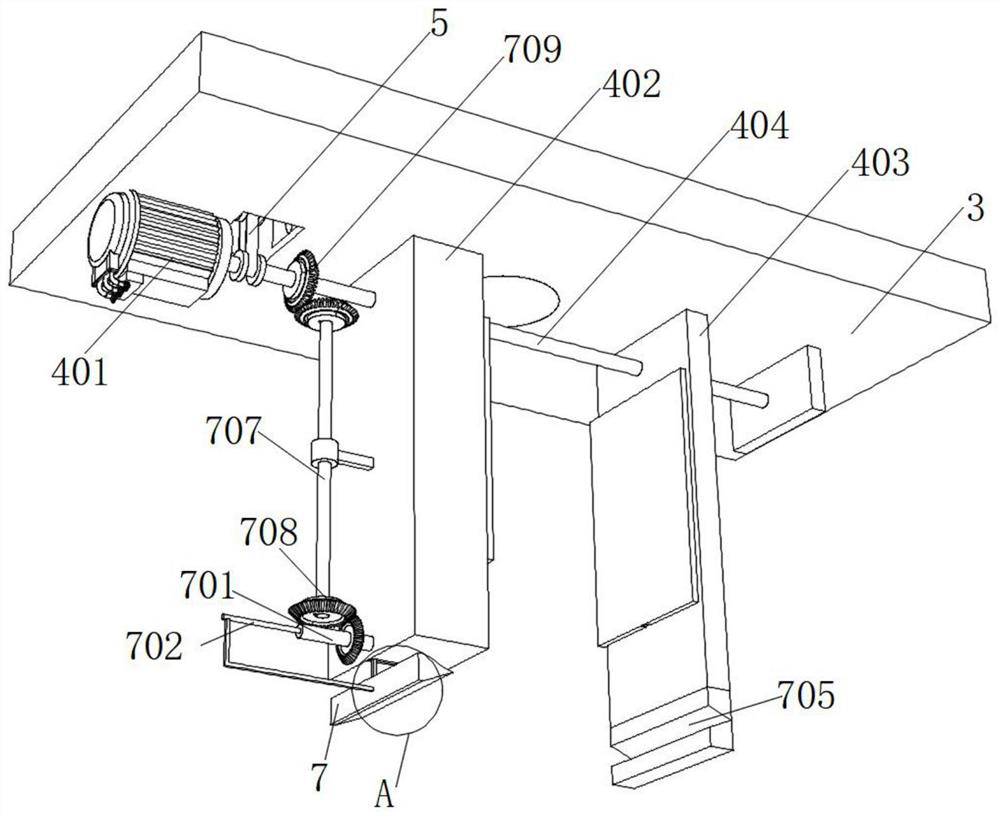
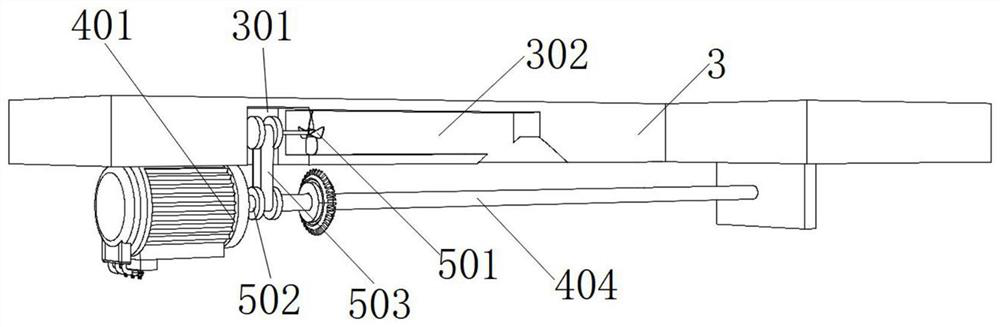
[0035] An intelligent tea-picking robot that recognizes and imitates human hands through artificial intelligence, including a frame 1, a central control module 8, and a camera 9. The inner top wall of the frame 1 is provided with a four-axis parallel robot 2, and the bottom of the four-axis parallel robot 2 is fixed. The strip plate 3 is connected, the camera 9 is arranged on the lower edge of one side of the strip plate 3, the bottom end of the strip plate 3 is provided with a clamping structure 4, the inside of the strip plate 3 is provided with an auxiliary structure 5, and the clamping structure One side of the bottom end of 4 is provided with a cutting structure 7, the other end of the bottom end of the clamping structure 4 is provided with a collection structure 6, the central control module 8 is arranged on one side of the frame 1, and the top of the central control modu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More