

Indoor scene model completion method based on plane constraint
An indoor scene and plane constraint technology, applied in the field of indoor scene model completion based on plane constraints, can solve the problems of poor description ability of 3D model details and texture parts, inability to solve hole completion tasks, and unsatisfactory completion effects, etc. Achieve the effect of good model texture information, eliminate interference, and robust plane completion effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The specific implementation of the invention patent will be described in detail below in conjunction with the accompanying drawings of this patent.
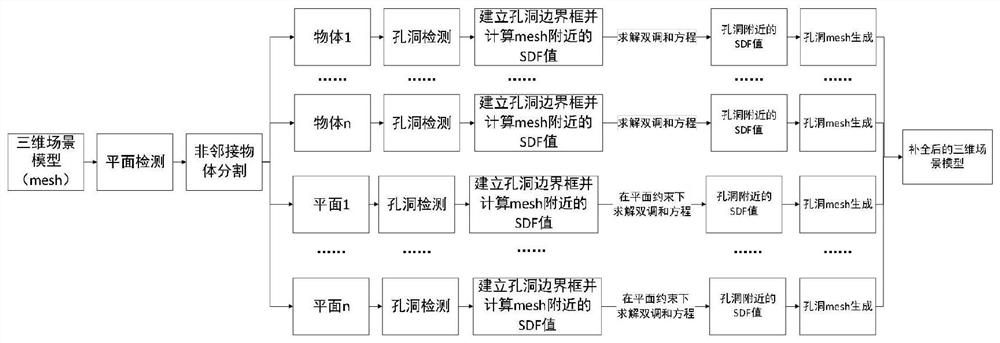
[0029] combine figure 1 .The flow chart of indoor scene model completion based on plane constraints, the present invention mainly includes the following steps:
[0030] Step (1), three-dimensional model plane detection based on RANSAC;
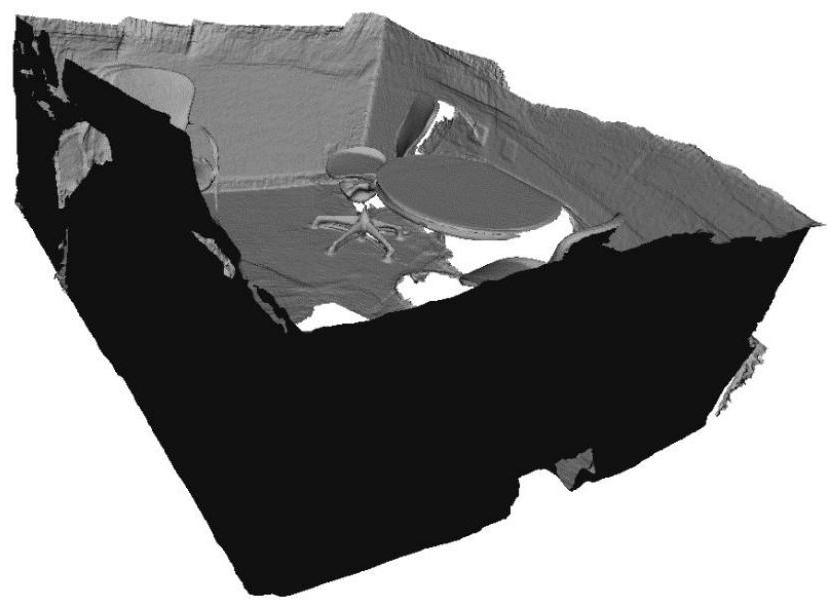
[0031] Such as figure 2 As shown, in the indoor 3D model obtained by the dense 3D reconstruction algorithm, the RANSAC plane detection algorithm is used cyclically to detect the plane in the 3D model and segment it from the 3D space. When , the cyclic RANSAC plane detection algorithm is terminated, that is, all the planes in the 3D scene are extracted, and the rest are object parts in the 3D space, and the whole model is divided into plane parts and non-plane object parts, and the pre-segmentation is completed. The hole completion task provides plane constraints.
[0032] Step (2), se...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More