

Vehicle behavior prediction method and device, equipment and medium
A prediction method and vehicle technology, applied in the direction of prediction, image data processing, 3D image processing, etc., can solve the problems that sub-module uncertainty cannot be effectively compensated, affect the performance of the scheme, and waste computing resources, so as to reduce computing power. The effect of resource consumption, improving calculation speed, and ensuring prediction accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
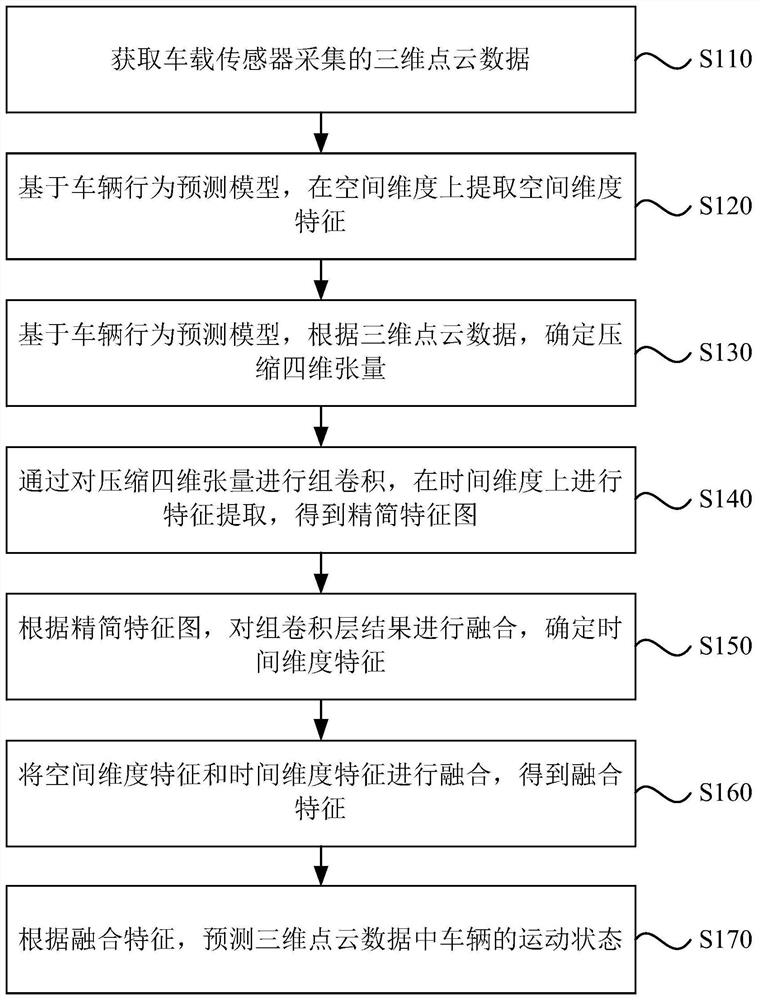
[0037] figure 1 It is a flow chart of a vehicle behavior prediction method provided in Embodiment 1 of the present invention. This embodiment is applicable to vehicle behavior prediction in unmanned driving technology. The method can be executed by the vehicle behavior prediction device provided in the embodiment of the present invention, which can be realized by software and / or hardware, and can be integrated on electronic equipment.
[0038] Specifically, such as figure 1 As shown, the vehicle behavior prediction method provided by the embodiment of the present invention may include the following steps:
[0039] S110. Acquire three-dimensional point cloud data collected by the vehicle sensor.
[0040] Among them, the 3D point cloud data is collected by vehicle-mounted sensors mainly based on lidar. 3D point cloud data is not RGB image data, in addition to containing the collection position, it also contains rich information, such as color information and intensity informa...
Embodiment 2
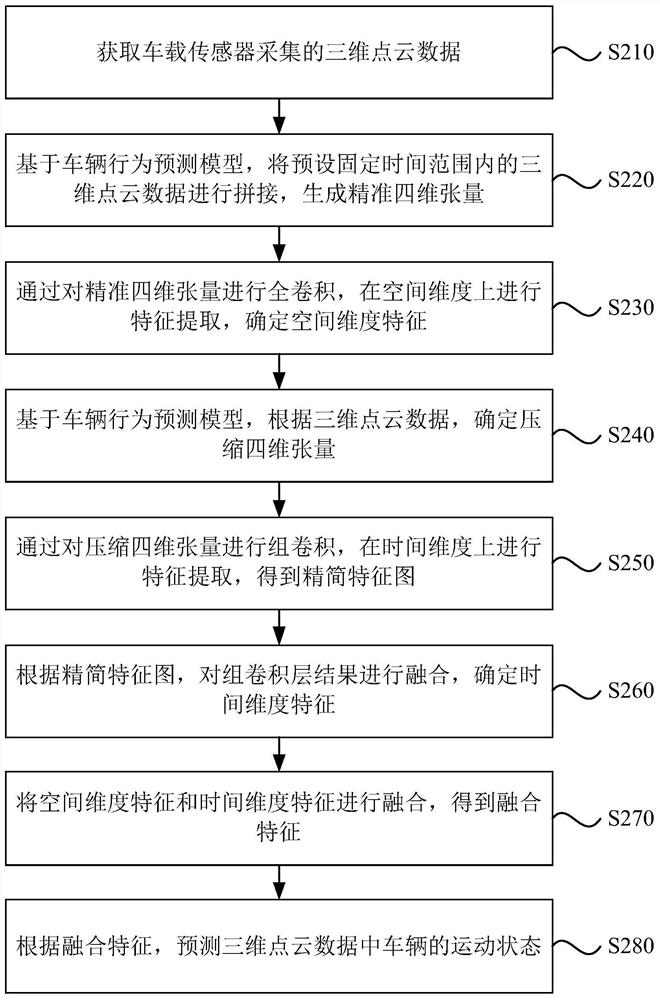
[0059] figure 2 It is a flow chart of a vehicle behavior prediction method provided by Embodiment 2 of the present invention. This method is further optimized on the basis of the above embodiments, and a specific introduction of how to extract spatial dimension features is given.
[0060] Specifically, such as figure 2 As shown, the method includes:
[0061] S210. Acquire three-dimensional point cloud data collected by the vehicle sensor.
[0062] Among them, the 3D point cloud data is collected by vehicle-mounted sensors mainly based on lidar. 3D point cloud data is not RGB image data, in addition to containing the collection position, it also contains rich information, such as color information and intensity information.
[0063] In order to improve the calculation speed, the input data can be simplified. After obtaining the 3D point cloud data collected by the vehicle sensor, the 3D point cloud data can be quantified based on the 3D voxel grid to obtain the quantized ...
Embodiment 3
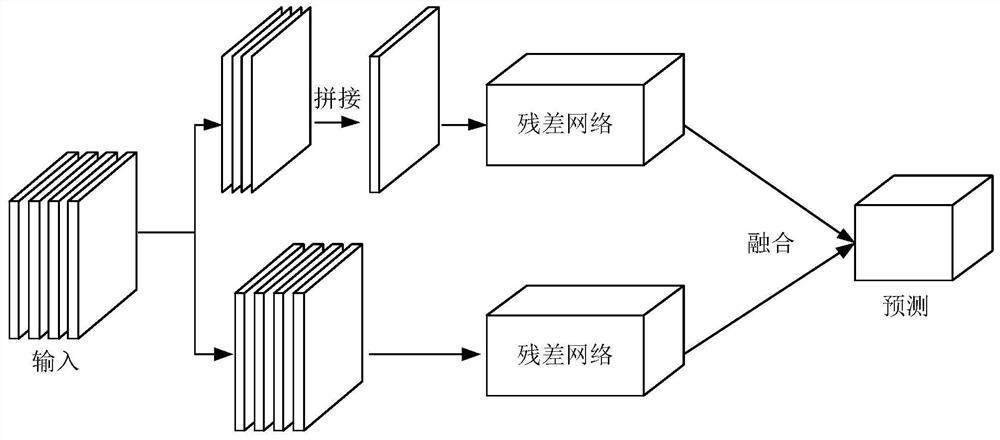
[0077] image 3 It is a network structure diagram of the vehicle behavior prediction model provided in Embodiment 3 of the present application. The embodiment of the present application provides a preferred implementation mode on the basis of the technical solutions of the foregoing embodiments.
[0078] This embodiment is implemented on the basis of the laser radar as the main vehicle sensor, so different from the traditional target detection algorithm, the input data is 3D point cloud data rather than RGB image data. In this embodiment, the input data is simplified, and the specific process can be divided into two parts: 1) quantify the 3D point cloud data based on the 3D voxel grid to obtain the quantified point cloud data; 2) through two Valued data encodes quantized point cloud data, that is, if there is original input data in this grid, it is set to 1, otherwise it is 0. Since the input data obtained through simplified processing is a sparse three-dimensional tensor, t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More