Method for accurately positioning the position of a workpiece on a machine tool and visual system
A technology of precise positioning and machine tool coordinate system, which is applied to computer components, image data processing, instruments, etc., can solve the problems of low positioning efficiency, time required, and large uncertainty in workpiece positioning operations, and achieve fast and accurate positioning, save The effect of positioning time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
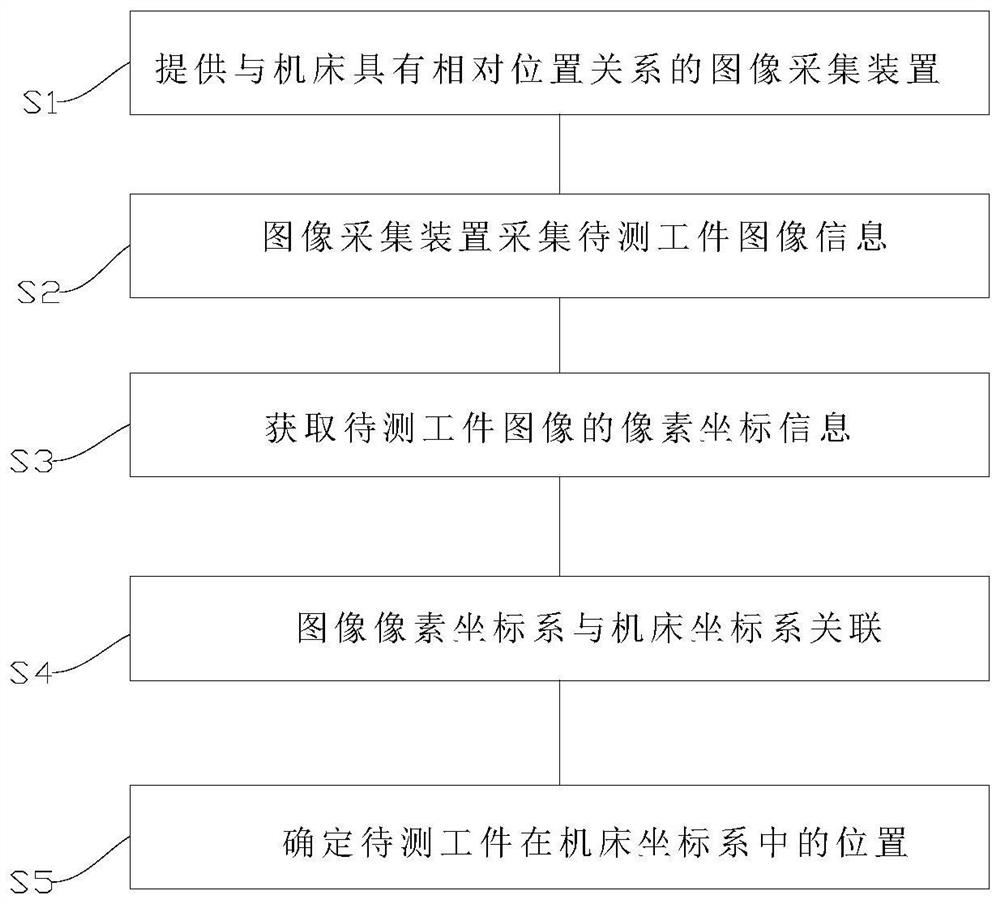
[0088] A precise positioning method for the position of a workpiece on a machine tool, which is used for associating the workpiece to be measured with the coordinate system of the machine tool, comprising the following steps:
[0089] S1: Provide an image acquisition device that has a relative positional relationship with the machine tool; the image acquisition device in this embodiment is an industrial camera. Set at least the first positioning point and the second positioning point, and use the first positioning point as the origin of the machine tool coordinates; then adjust the industrial camera to a height where the field of view of the photo is at least enough to include the first positioning point and the second positioning point.
[0090]The specific parameters of the camera in this embodiment are that the field of view of the image is 500mm×500mm, the distance between the camera and the object to be measured is 500mm, and the measurement accuracy of the image should re...
Embodiment 2
[0118] A precise positioning method for the position of a workpiece on a machine tool, which is used for associating the workpiece to be measured with the coordinate system of the machine tool, comprising the following steps:
[0119]S1: Provide an image acquisition device that has a relative positional relationship with the machine tool; the image acquisition device in this embodiment is an industrial camera. Set at least the first positioning point and the second positioning point, and use the first positioning point as the origin of the machine tool coordinates; then adjust the industrial camera to a height where the field of view of the photo is at least enough to include the first positioning point and the second positioning point.
[0120] The specific parameters of the camera in this embodiment are that the field of view of the image is 500mm×500mm, the distance between the camera and the object to be measured is 500mm, and the measurement accuracy of the image should re...
Embodiment 3
[0185] This embodiment proposes a machine tool, including a machine tool body, an image acquisition device and a processor for manipulating the machine tool to drive it to perform vector motion, and the processor executes the precise positioning of the workpiece on the machine tool in the above-mentioned embodiment 1 or embodiment 2 method. The precise positioning method of the position of the workpiece on the machine tool can enable the rapid and accurate positioning of the position of the workpiece on the machine tool. It is worth mentioning that a machine tool also includes a supplementary light device. The supplementary light device includes a mobile bracket and a light source. The light source is installed on the mobile bracket, and the mobile bracket is placed at a suitable position on the machine tool. . A supplementary light device is added outside the machine tool, and the light source is irradiated on the workpiece, highlighting the edge features of the workpiece to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com