

Method for correcting external parameters of laser radar in unmanned driving
A laser radar and unmanned driving technology, applied in the field of data processing, can solve low-level problems, reduce the correction time, improve the correction effect, and save the correction cost.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings. Obviously, the described embodiments are only some embodiments of the present invention, rather than all embodiments . Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
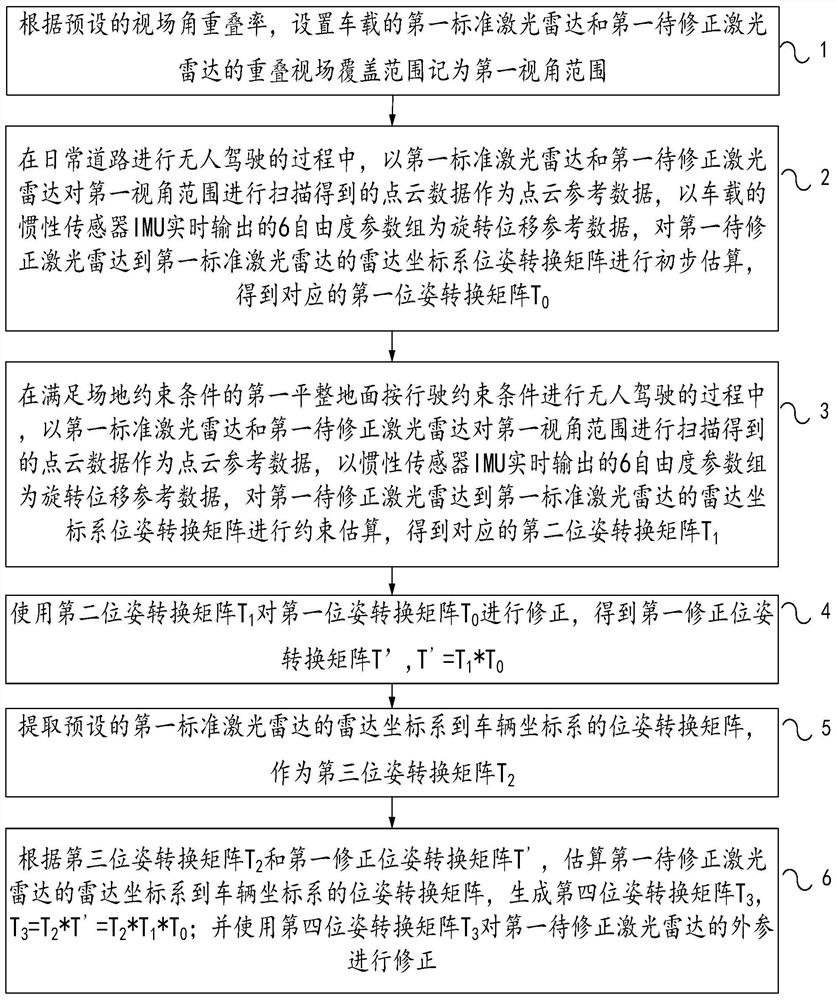
[0034] When the vehicle wants to correct the external parameters of the laser radar of its own vehicle, a standard laser radar that has been calibrated is installed on the vehicle in advance, and then through the correction of the external parameters of the laser radar in unmanned driving provided by Embodiment 1 of the present invention Method, use the standard lidar to be corrected lidar on the daily road to conduct a preliminary estimati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More