

Mobile robot navigation method and device, computer equipment and storage medium
A technology of mobile robots and navigation methods, applied in mechanical equipment, combustion engines, neural learning methods, etc., can solve problems such as low data utilization, high complexity and cost, weak generalization performance in different scenarios, etc., and reduce computing power. volume effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0064] In order to make the purpose, technical solution and advantages of the present application clearer, the present application will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present application, and are not intended to limit the present application.
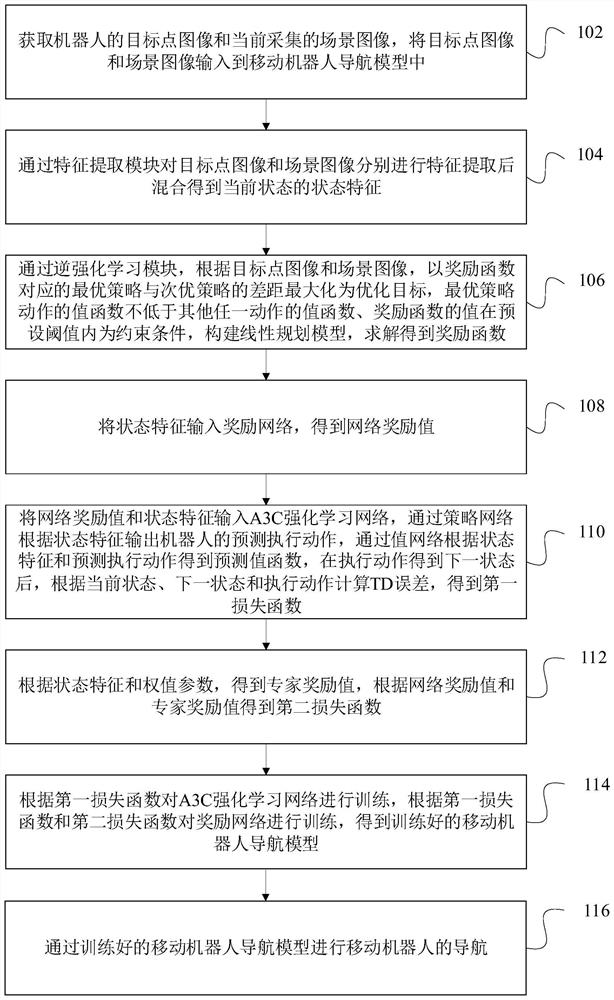
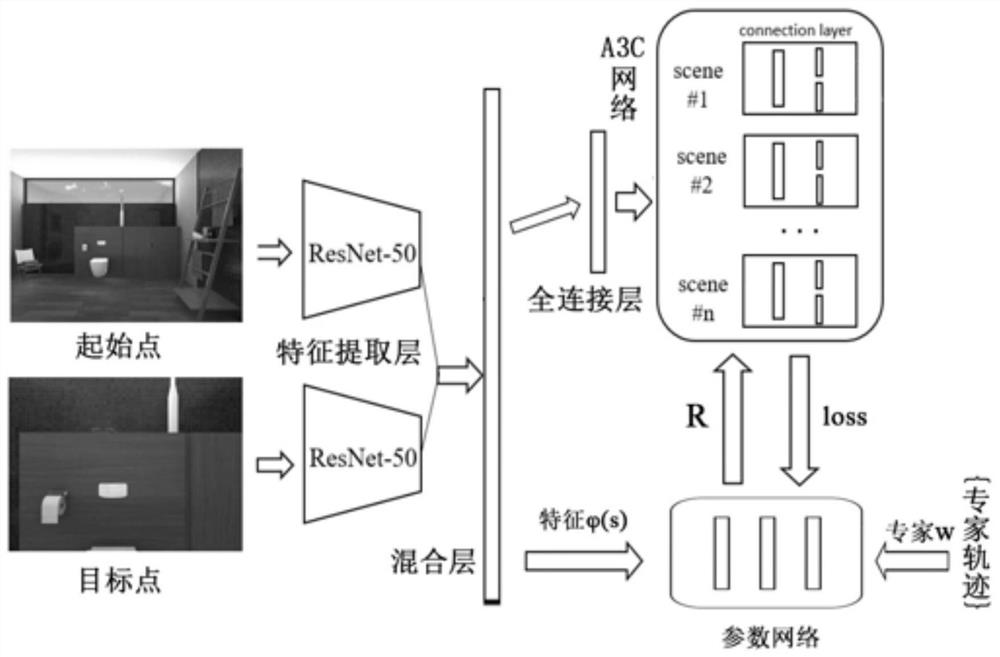
[0065] The mobile robot navigation method provided in this application can be applied in the following application environments. Among them, the terminal implements a mobile robot navigation method, and extracts the features of the target point image and the scene image through the feature extraction module to obtain the state characteristics of the current state; solves the preset expert trajectory through the inverse reinforcement learning module, and obtains the reward function; The predicted execution action of the robot is output through the policy network in the A3C ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More