Pipeline trolley navigation method based on cross laser and monocular vision system
A monocular vision, navigation method technology, applied in navigation calculation tools, control/adjustment systems, two-dimensional position/channel control and other directions, can solve the problems of low detection accuracy, narrow internal space, complicated installation, etc., to achieve navigation efficiency High, simple algorithm, high efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
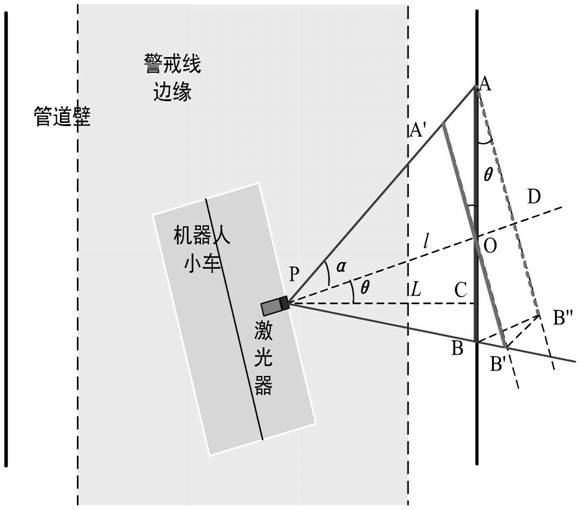
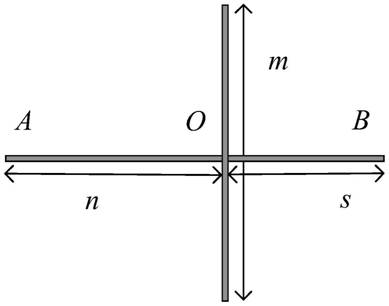
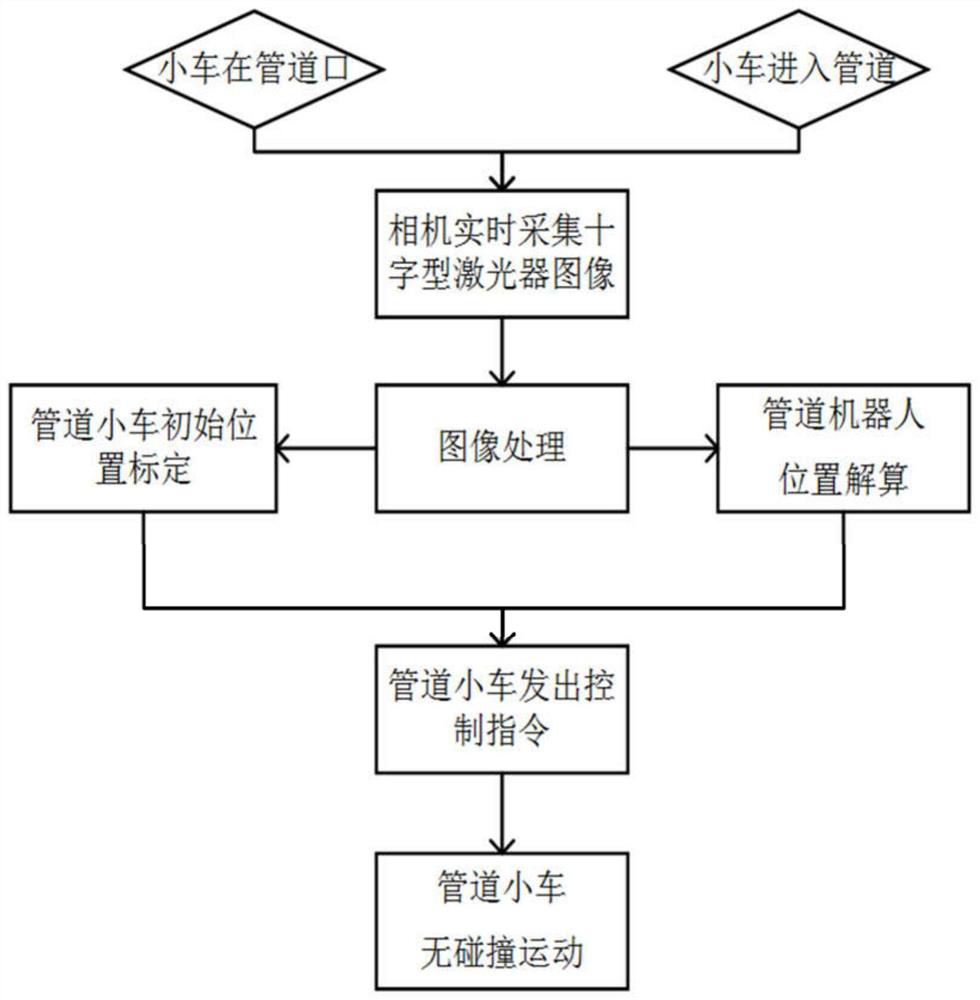
[0048] Using the visual measurement technology combining monocular vision and cross-shaped structured light, through the calibration of the internal and external parameters of the navigation system, the image processing technology is used to quickly extract the length information of the target cross, and then realize the pose measurement of the pipeline trolley. The information plans the path of the pipeline trolley, so as to realize the navigation control of the robot. This method realizes the navigation of the pipeline trolley in the narrow pipeline space. It has the characteristics of rapidity, safety and real-time, and can realize the navigation of the pipeline trolley in the pipeline. safe operation.
[0049] Refer to attached figure 1 with 2 , the specific steps of the pipeline car navigation method based on the cross-type laser and th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More