Orthopedic postoperative rehabilitation system based on three-dimensional tail end traction rehabilitation robot
A rehabilitation robot, orthopedic surgery technology, applied in passive exercise equipment, physical therapy and other directions, can solve the problem of limited use, excessive range of motion of the robotic arm, or the direction of the handle is parallel to the ground, increasing the movement to the singular point. Possibility and other issues, to achieve the effect of reducing inconvenience, reasonable movement trajectory, and small space range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
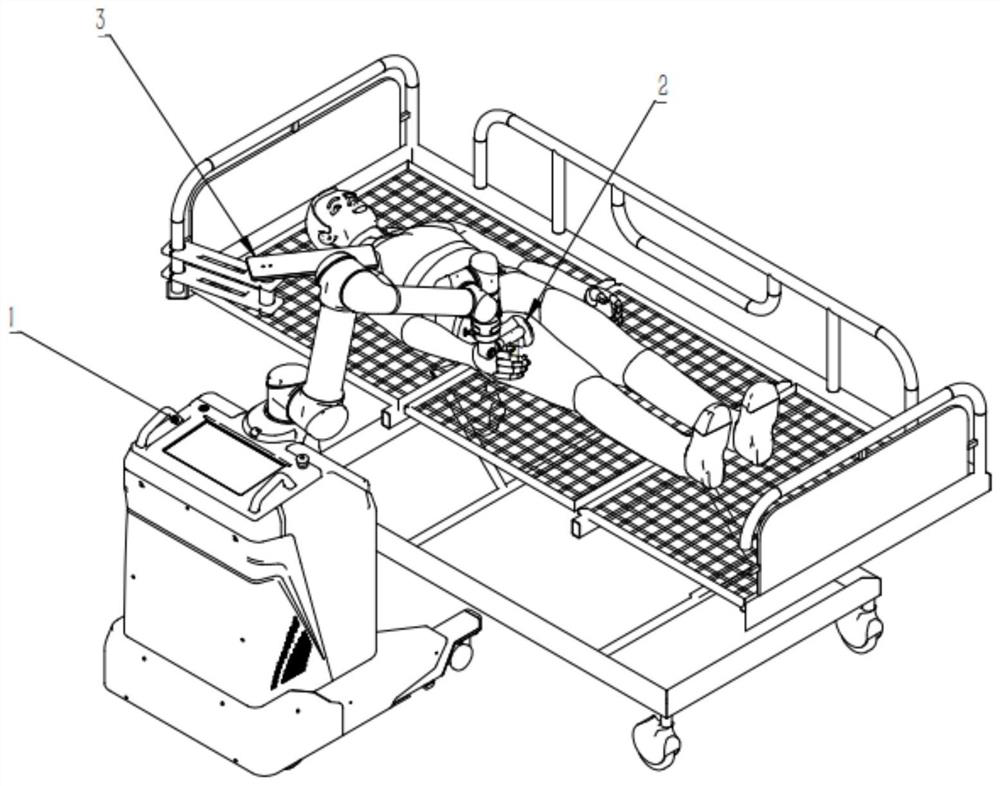
[0022] This application provides an orthopedic postoperative rehabilitation system based on a three-dimensional terminal traction rehabilitation robot, such as figure 1 shown, including:
[0023] The three-dimensional terminal traction rehabilitation robot 1 used for postoperative rehabilitation of patients in orthopedics, records the trajectory of the rehabilitation treatment techniques of the rehabilitation physician through the function of trajectory reproduction, and then performs rehabilitation training for the patient instead of the doctor;
[0024] The shoulder immobilization device 3 used to prevent the patient from compensating the shoulder due to pain, one end is tightened and fixed on the metal bracket of the hospital bed by bolts; the other end is pressed against the patient's shoulder by a pressure plate;
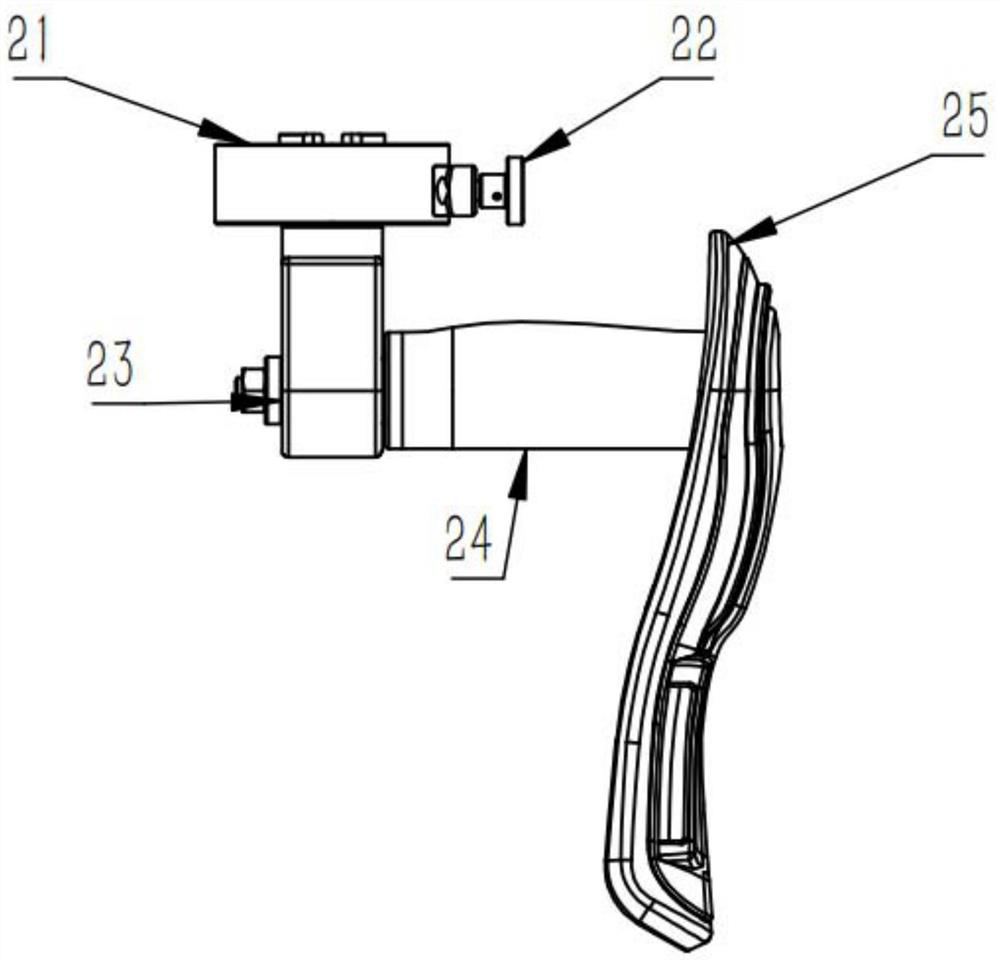
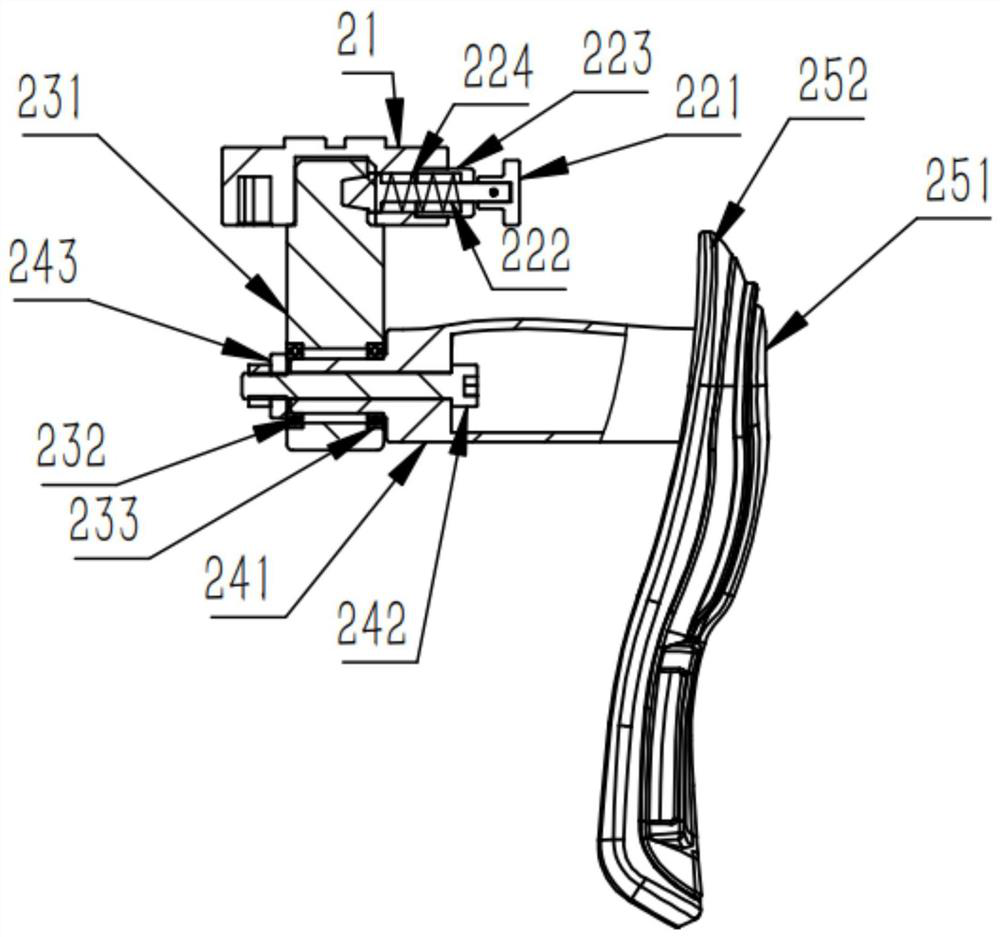
[0025] Dedicated handle 2 dedicated to rehabilitation after orthopedic surgery, such as figure 2 , image 3 As shown, it includes: a mounting base 21 for co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com