

Variable instantaneous center bionic lower limb exoskeleton robot based on compliant driving
An exoskeleton robot and drive technology, applied in the field of robotics, can solve problems such as low output limit, lack of mechanical support, and large joint friction, so as to reduce additional load, improve human-computer interaction, and increase service life.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] In order to facilitate those skilled in the art to understand and implement the present invention, the present invention will be described in further detail below in conjunction with the accompanying drawings. It should be understood that the implementation examples described here are only used to illustrate and explain the present invention, and are not intended to limit the present invention.
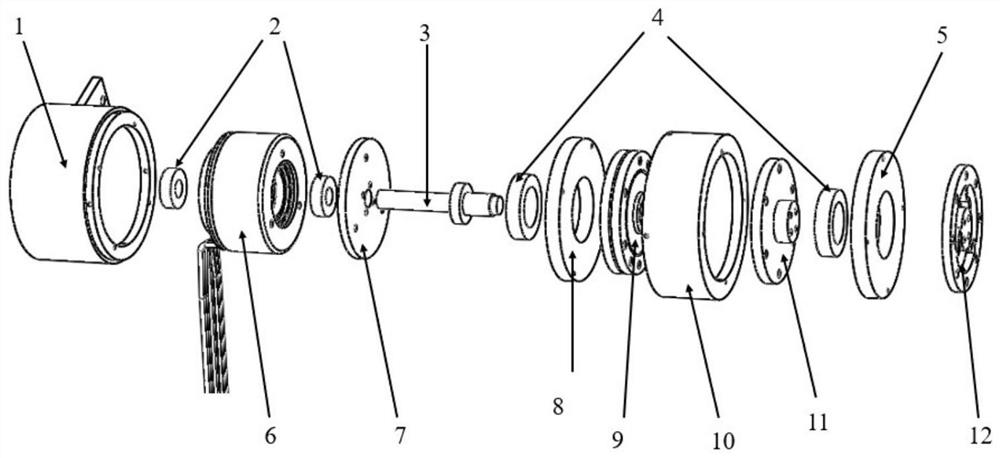
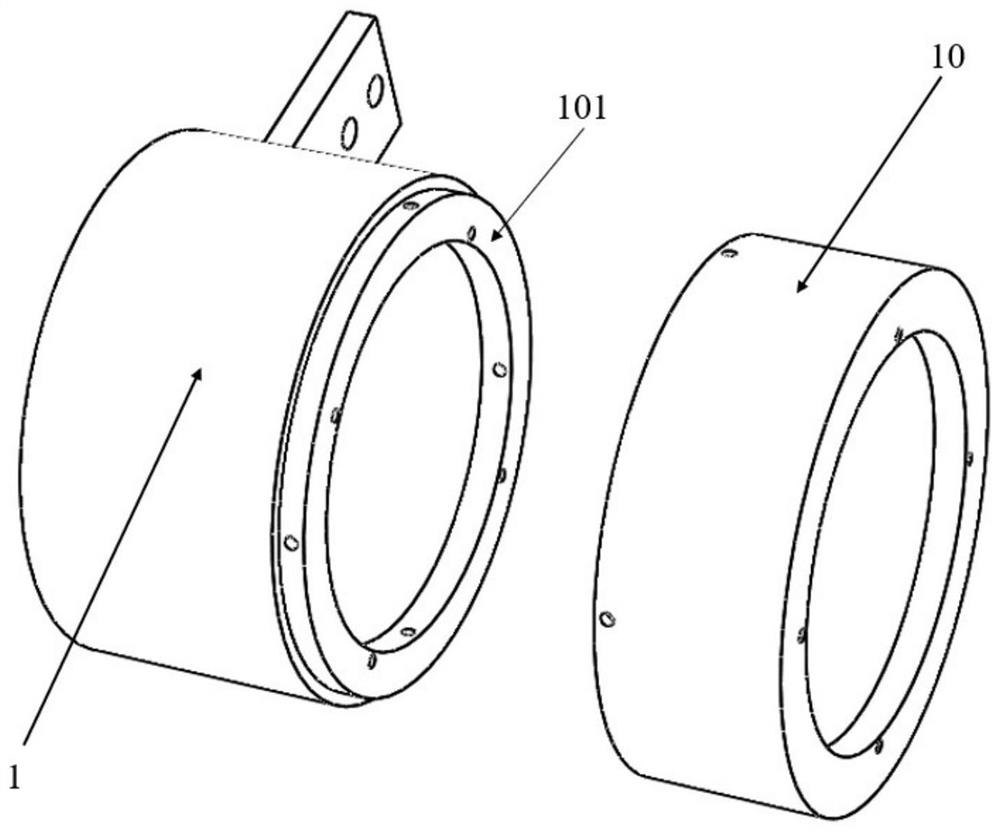
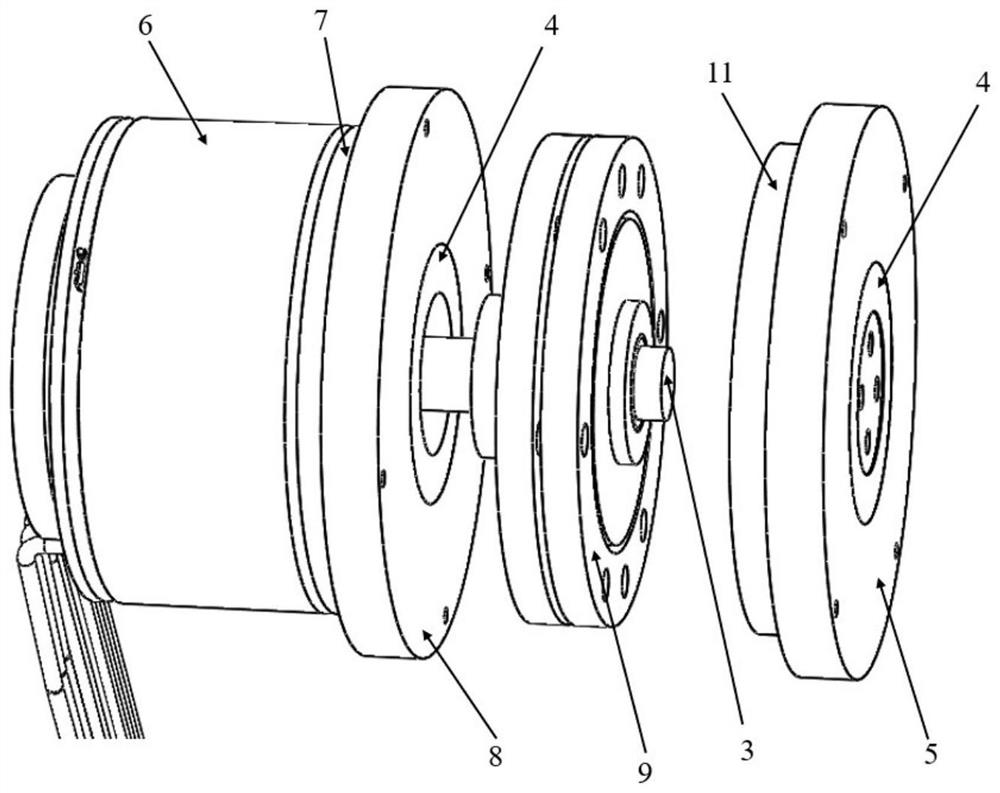
[0030] Such as Figure 1 to Figure 5 As shown, a biomimetic lower extremity exoskeleton robot based on compliant drive, including hip joint structure II, knee joint structure III and ankle joint structure IV connected in sequence, the drivers in hip joint structure II and knee joint structure III are The series elastic driver I includes a frame, the frame includes a motor mounting frame 1 and a casing 10, the motor mounting frame 1 and the casing 10 are fixedly connected, and the motor mounting frame 1 is equipped with a frameless DC servo motor 6, without The frame DC servo mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More