

Robot skill acquisition method based on meta-learning under guidance of scene memory
A skill acquisition and robotics technology, applied in the field of robot operation skill learning based on episodic memory and meta-learning, can solve the problems of inability to accumulate experience to guide rapid learning of new tasks and the need for repeated training, so as to improve learning efficiency and execution success rate. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The specific implementation manners of the present invention will be further described below in conjunction with the accompanying drawings and technical solutions.
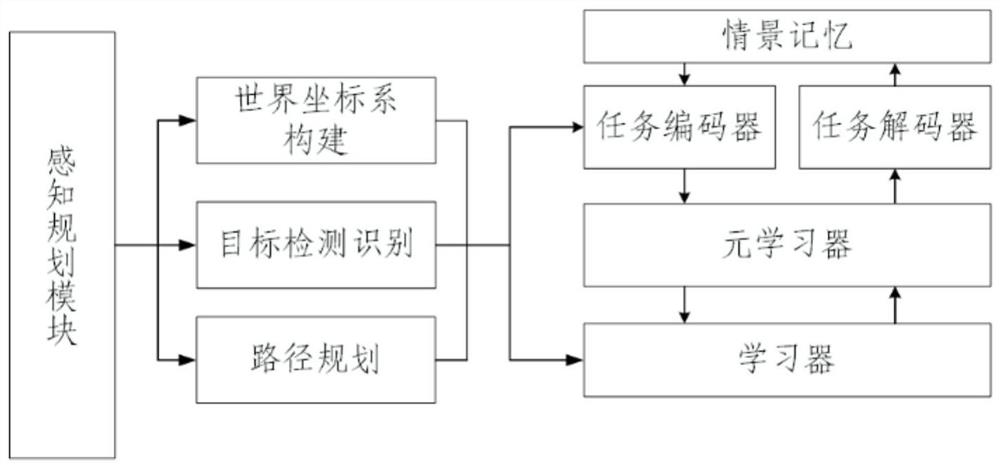
[0021] The flow chart of robot skill acquisition based on meta-learning provided in the example of the present invention is guided by the situation, see figure 1 . Based on the meta-learning method guided by episodic memory, the present invention constructs a perception planning module, realizes the positioning and identification of objects through target detection, and realizes the path planning algorithm of the manipulator as the basis of motion elements. The encoder and the task decoder realize the interaction between episodic memory and the meta-learning network. The encoder encodes a single task of the meta-learning network into addressable labels, and the task decoder decodes the episodic experience into information that can be passed to the meta-learning network. In the meta-learning process, the me...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More