

AGV pedestrian following method based on monocular camera
A pedestrian and camera technology, applied in computer parts, image data processing, instruments, etc., can solve problems such as inability to measure distance accurately, require high time measurement accuracy, and limit the measurement range of the camera baseline, so as to improve real-time performance and decentralization Calculating the effect of pressure, simple and efficient real-time tracking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments. This embodiment is carried out on the premise of the technical solution of the present invention, and detailed implementation and specific operation process are given, but the protection scope of the present invention is not limited to the following embodiments.
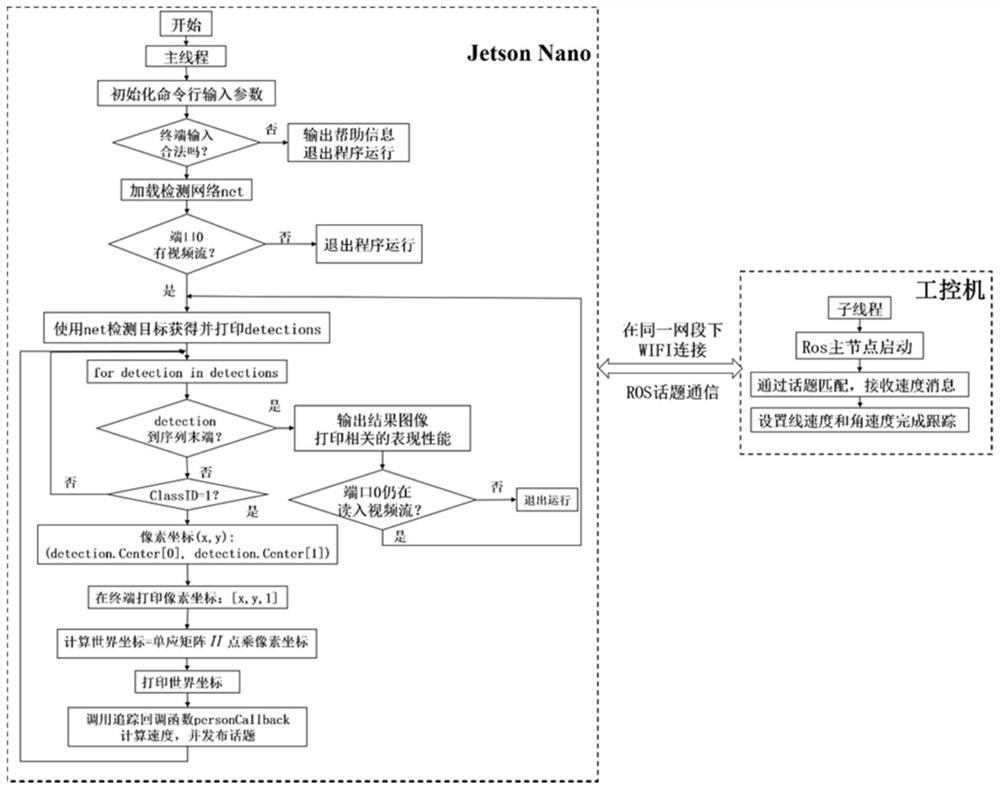
[0048] The present invention provides an AGV pedestrian following method based on a monocular camera to realize the following of pedestrians by an indoor mobile robot. The schematic flow chart of the method is as follows Figure 1a-1c As shown, it specifically includes the following steps:
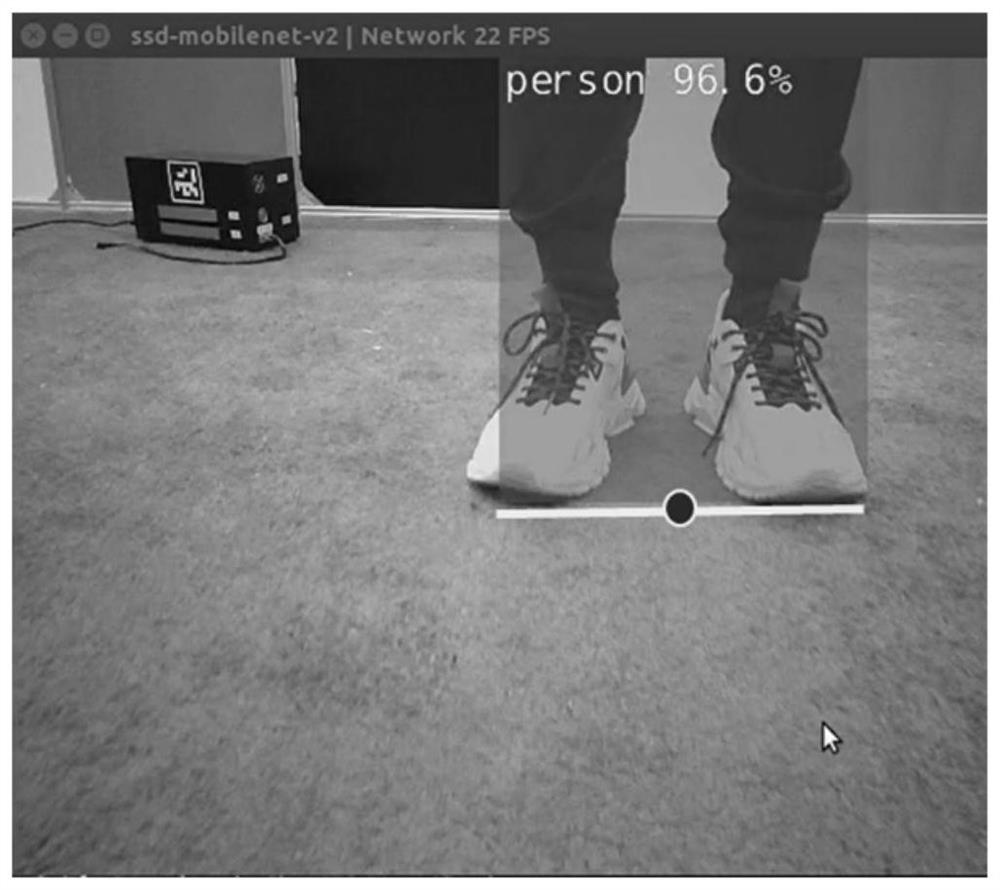
[0049] S1. Detection of pedestrian targets: Firstly, MobileNet is used to improve the SSD single-stage target detector, and after TensoRT accelerated model reasoning, the model is deployed on the AGV embedded platform to realize real-time pedestrian target detection with a speed of more than 22FPS...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More