

Near-field sparse array antenna beam establishment method and device
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0195] Simulation:
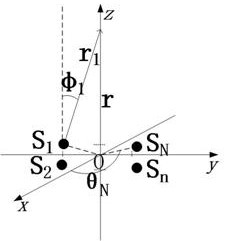
[0196] Suppose the full-directional antenna transmitted signal frequency on each drone in the drone group is 30MHz, the direction of the direction is θ = [- 180 °, 180 °], = [- 60 °, 60 °], expects the main flap beam pointing to = 0 ° direction, observation target distance is 300,000λ, the drone group is initially connected to the two-dimensional plane of the 1000λ × 1000λ, the number of total racks is 32, theoretical, the pitch distribution, the pattern distribution, the pattern distribution is more sample It is more likely to find the optimal solution, that is, the optimal effect of the synthetic beam may be better, but considering the factors such as the size, speed and position positioning error of the drone, the position between the drone is not generated. Constrain d n ≥ d min = 10λ, set to suppress the sub-flap in the synthetic beam, take Ω 1 = 0.8, = 0.2, under the distribution range of the drone group and the target distance limit, the ideal main l...
Embodiment 2
[0201] Comparative experiment verification:
[0202] The adaptive value value value change value of the ADE method and genetic method to be obtained by Monte Carlo test is run, respectively. Figure 7 As shown; wherein the number of genetic methods is 100, the hybridization rate is 0.7, the selectivity is 0.5, the variant is 0.5, and the elite reservation method is used, the remaining conditions are consistent with the simulation verification setting; the beginning of the mutant operator, ADE The method is relatively fast. As the algebra increases, the variation operator gradually decreases, so that the ADE method is gradually stable, and the final adaptation function value is 0.2624, which is less than the adaptive function value when the unit is evenly distributed. ;
[0203] After the genetic method passes through one hundred generations, the adaptation function value does not decline, indicating that the 100 generation is not sufficient to make an individual that the adaptivity...
Embodiment 3
[0209] The simulation condition is set to the same, and the random error is added to the solved error when solving the adaptive function value, and the GPS navigation error is generally different from two planes perpendicular to the horizontal plane. [-0.2m, 0.2m], the error range on the vertical surface is [-0.1m, 0.1m], and the error range is added when solving the adaptive function value, because the present invention does not discuss the drone on the vertical surface The movement only focuses on the distribution formation of the drone on the horizontal plane, solving the position of the element XOY Planar formation is shown in Fig. 11 (a) and Fig. 11 (b);
[0210] Convergence in a certain ADE method iteration Figure 12 As shown, the adaptation function value is affected by the position error; the reason is that even if the cell position determination value is the same, it is affected by the position error, and its adaptation function value is different; the position error in t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More