

Visual grabbing test device and system
A technology of testing device and grasping device, applied in conveyor control device, loading/unloading, transportation and packaging, etc., can solve the problems of a large number of manual operations, low testing efficiency, poor testing effect, etc. Effects of stability and reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] In order to make the purpose, technical solutions and advantages of the specific embodiments of the present invention clearer, the specific embodiments of the present invention will be further described in detail below in conjunction with the accompanying drawings. Here, the exemplary embodiments and descriptions thereof of the present invention are used to explain the present invention, but not to limit the present invention.
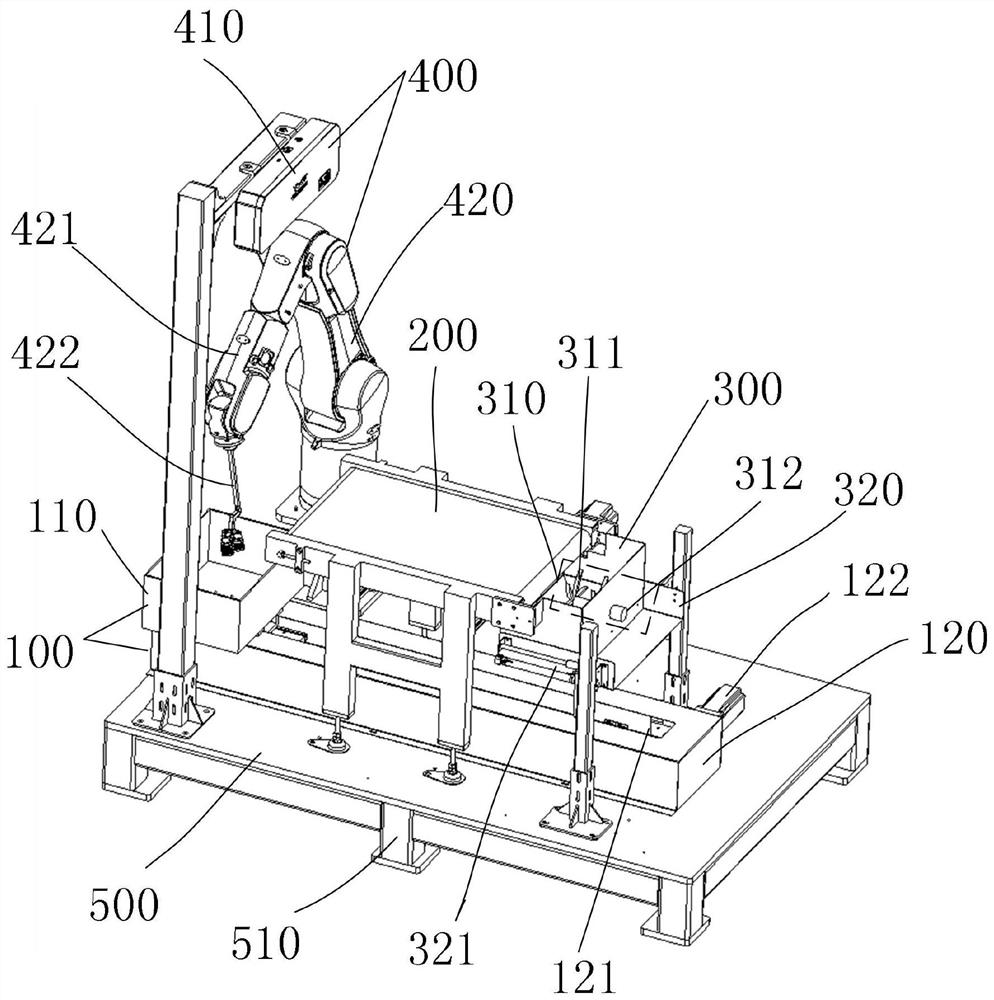
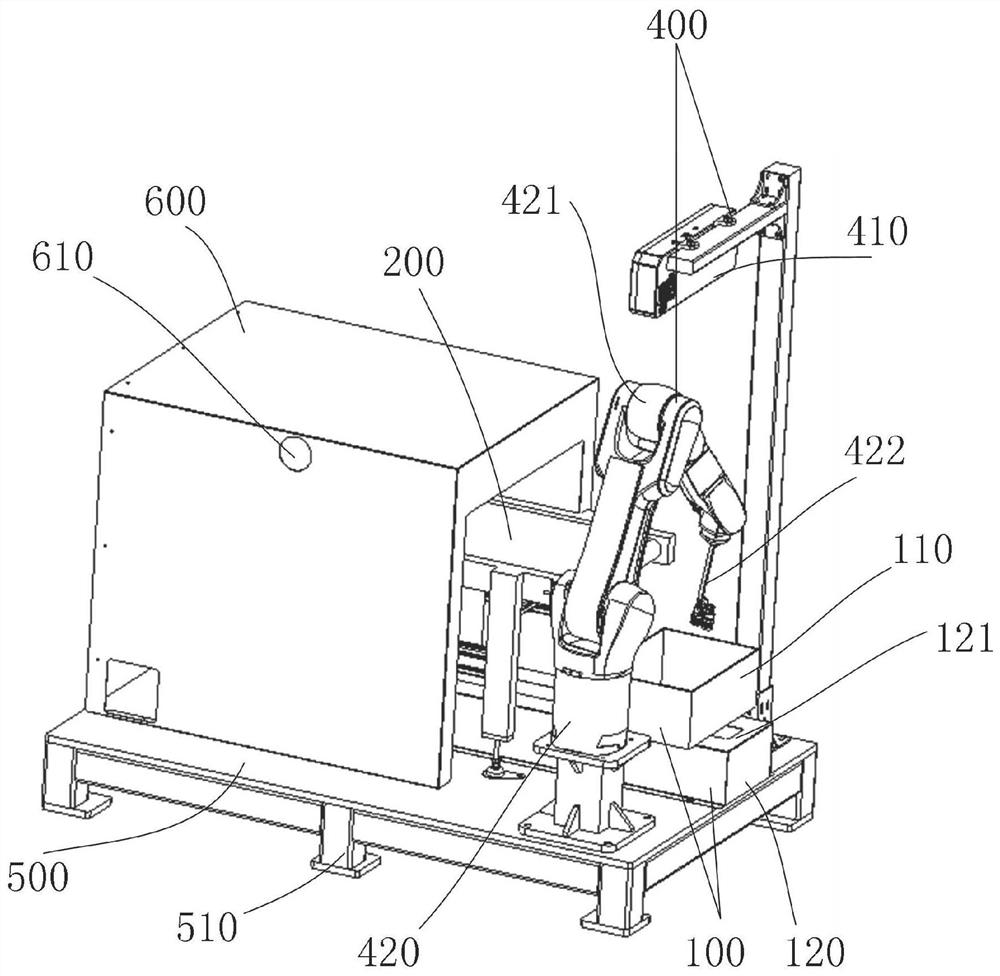
[0030] Such as figure 1 and figure 2 As shown, the present invention provides a visual grasping test device that does not require human participation to simulate actual operating conditions, realize uninterrupted testing of material grasping, and then quickly improve the stability and reliability of the material grasping device , the visual grasping test device includes a feeding mechanism 100, a material conveying mechanism 200 and a buffer bin 300, wherein:
[0031] The feeding mechanism 100 is used to place materials for the visual graspin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More