Automobile glass transportation robot capable of crossing rail automatically and transportation method of automobile glass transportation robot
A technology for automotive glass and robots, applied in motor vehicles, transportation and packaging, etc., can solve the problems of large size, inability to effectively achieve transportation, loss, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] In the following description, numerous specific details are given in order to provide a more thorough understanding of the present invention. It will be apparent, however, to one skilled in the art that the present invention may be practiced without one or more of these details. In other examples, some technical features known in the art are not described in order to avoid confusion with the present invention.
[0038] The present invention relates to a kind of auto glass transportation robot and its transportation method that automatically deviates from the track, and the specific scheme is as follows:
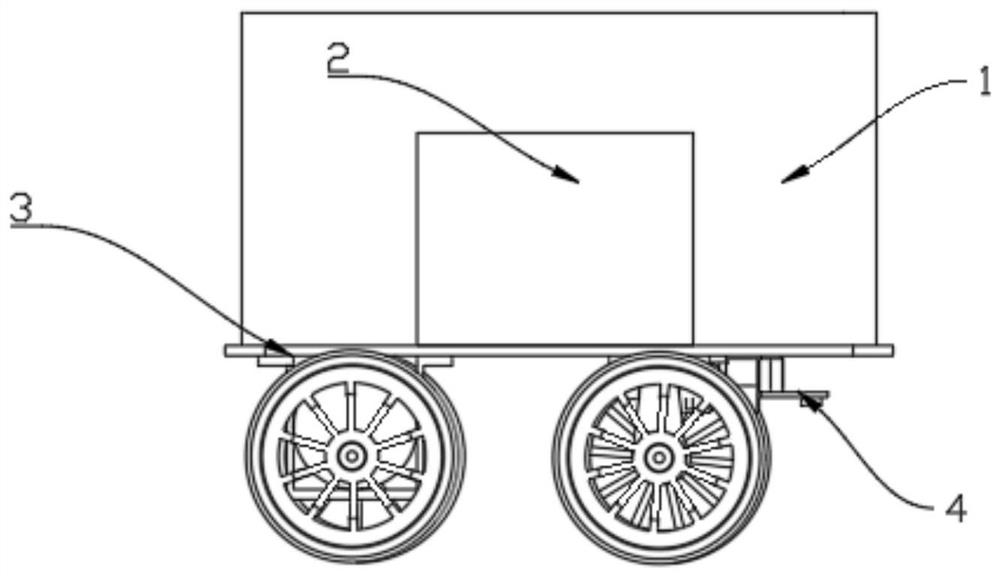
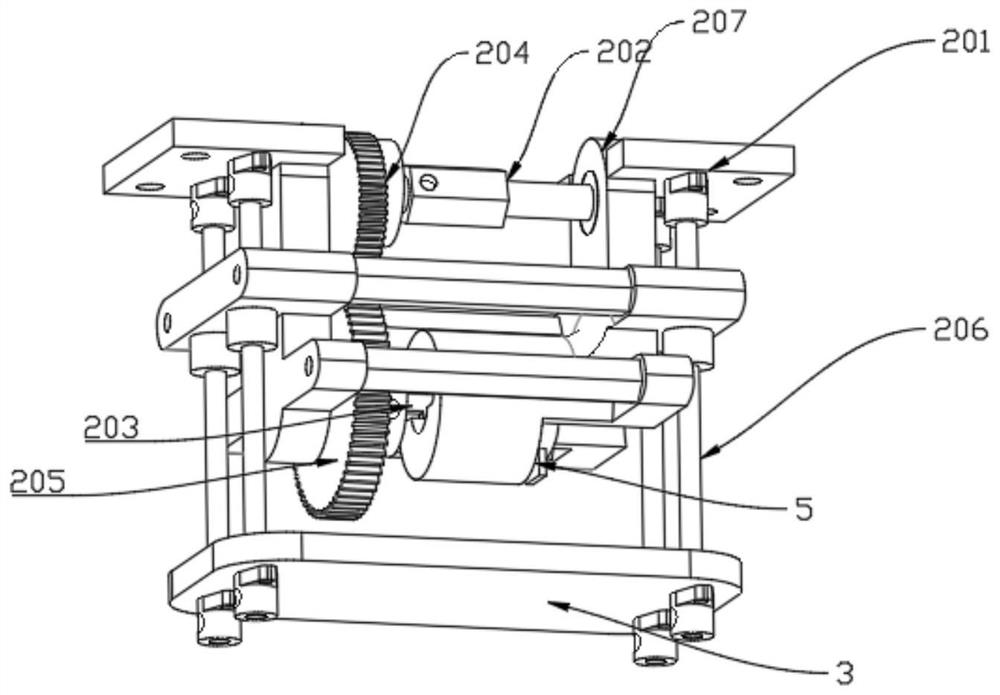
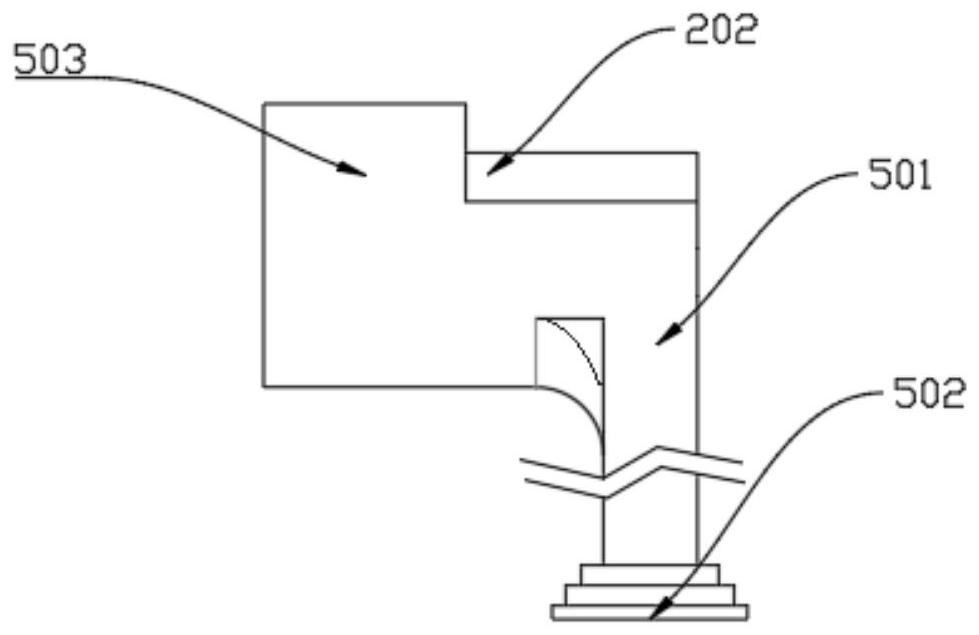
[0039]Such as Figure 1 to Figure 6 As shown, an automatic off-track auto glass transport robot includes a range finder 4 fixed on the bottom of the carrying case 1; off-track components 2 are symmetrically fixed on both sides of the frame 3, including fixed distances on the frame 3 The connecting plate 201, the first rotating wheel 204 fixedly connected along the ax...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More