

Driving device for flexible joint of minimally invasive surgical instrument based on universal ball joint control
A technology of spherical universal joints and flexible joints, which can be used in surgery, medical science, etc., and can solve problems such as difficulty in driving flexible joints, complex structures, and bloated overall design
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
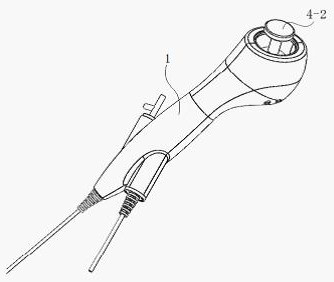
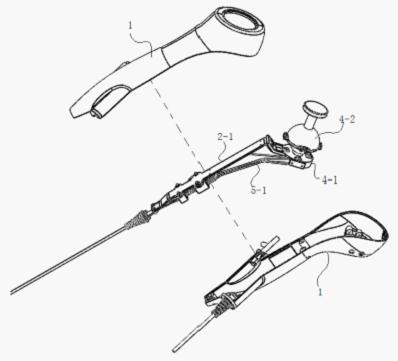
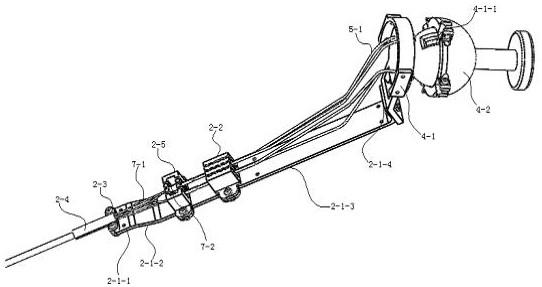
[0054] A driving device for a flexible joint of a minimally invasive surgical instrument controlled by a spherical universal joint, comprising an operating handle housing 1 and a flexible joint 2; also including a soft lock 3, a buffer assembly, a rear-end control mechanism and a support set in the housing Frame 2-1, support frame 2-1 is fixedly provided with outer tube fixing part 2-3 and limit seat 2-2, outer tube fixing part 2-3 is fixedly provided with outer tube 2-4, one end of flexible joint 2 It is fixed in the outer tube 2-4; the limit seat 2-2 is provided with a limit groove; the rear-end control mechanism is a spherical universal joint, and the spherical universal joint includes the rear-end first-level component 4-1 and a rear-end one The rear-end secondary assembly 4-2 concentrically arranged by the first-stage assembly 4-1, the rear-end primary assembly 4-1 is provided with a rotating inner spherical surface, the rear-end secondary assembly 4-2 is provided with a r...
Embodiment 2
[0064] The rest are consistent with the scheme of embodiment 1, and the limiting protrusion 4-2-1 is a cylindrical protrusion. The limit protrusion 4-2-1 is a cylindrical protrusion, and the limit protrusion is arranged at the symmetrical position of the inner sphere center of the rear-end secondary component 4-2. When the rear-end secondary component 4-2 moves to the X direction , the limit projection slides in the notch of the rear-end primary assembly 4-1, and when the rear-end secondary assembly 4-2 moves in the Y direction, the limit projection slides in the rear-end primary assembly 4-1. 1 in the notch to perform rotational movement, when the rear-end secondary component 4-2 rotates coaxially, since the limiting protrusion is in the notch of the rear-end primary component 4-1, it is limited by the notch, so the rear The first-stage assembly 4-1 at the end and the second-stage assembly 4-2 at the rear end cannot perform head-circumferential movement with each other.
Embodiment 3
[0066] The rest are consistent with the scheme of embodiment 1 or 2, the present invention also includes an adjustment assembly, the adjustment assembly includes a screw 6-1 and a nut 6-2 compatible with the screw 6-1, and the rear end secondary assembly 4-2 is evenly The limited lifting lug 4-2-2 is distributed, the screw 6-1 forms a detachable fixed connection with the limiting lifting lug 4-2-2 through the nut 6-2, and the screw 6-1 is provided with a positioning hole 6-1- 1. One end of the flexible lock 3 is adapted to connect with the flexible joint 2, and the other end first passes through the spring protection tube 5-1 or the guide hose, then passes through the positioning hole 6-1-1 and is fixed to the screw 6- of the adjustment component 1, the number of buffer components: the number of positioning channels 4-1-1: the number of limit lifting lugs 4-2-2: the number of screws 6-1: the number of soft locks 3=1:1:1:1 :1.
[0067] The adjustment component is used to preci...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More