Plate pressing device, material pressing and taking method and automatic sorting system.
A press plate and splint technology, which is applied in the direction of auxiliary devices, program-controlled manipulators, manipulators, etc., can solve problems that affect workpiece grasping, affect production efficiency, and workpieces cannot be grasped, and achieve stable operation, simple structure, and low cost. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
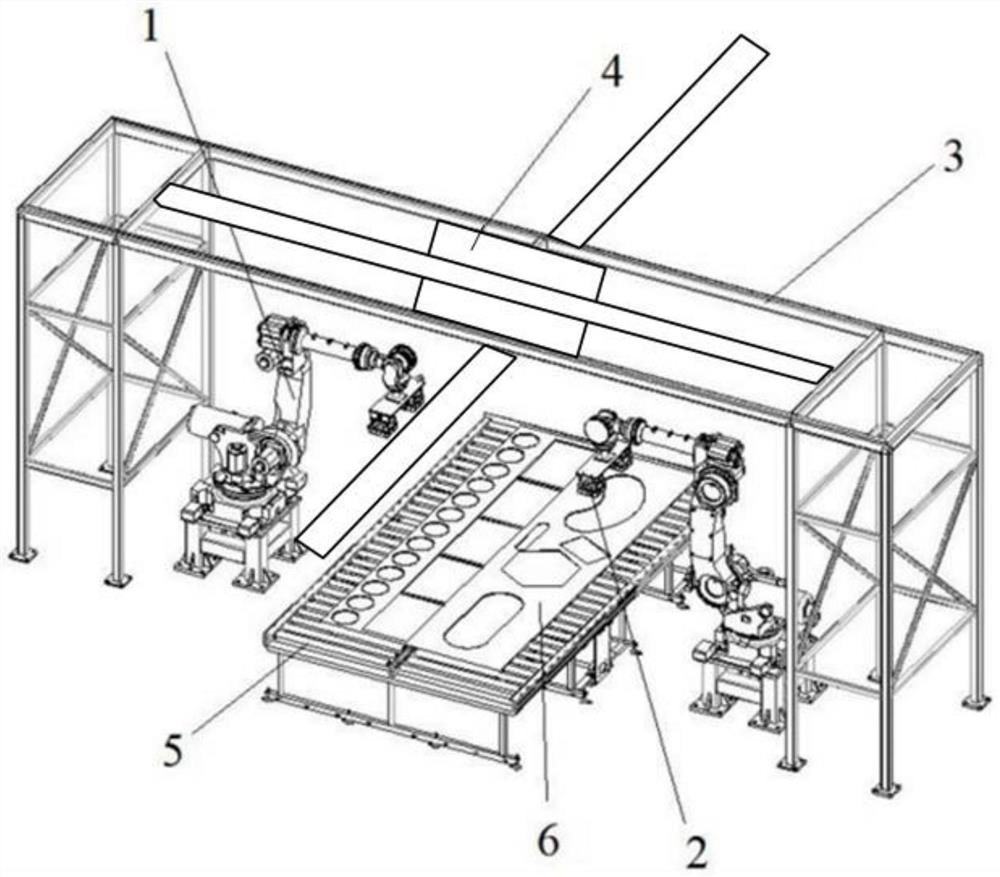
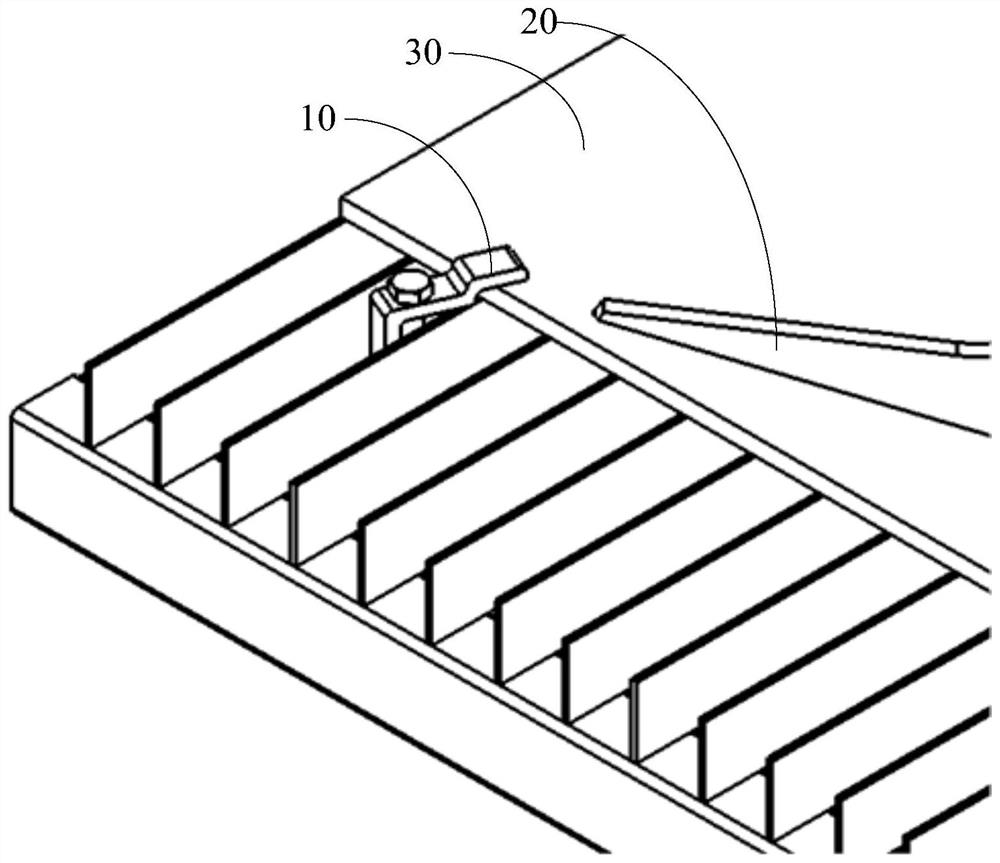
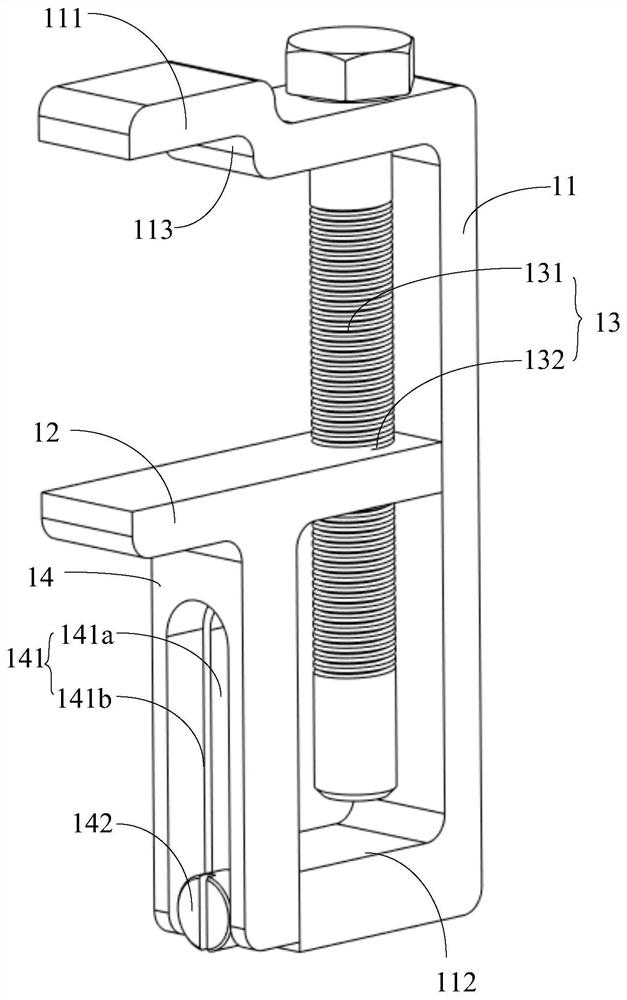
[0047] refer to Figure 1 to Figure 3 , the present invention proposes a platen device, the platen device 10 includes: a base 11, a movable splint 12, a Z-axis driving assembly 13, and a Z-axis sliding assembly 14; One side of the seat 11 is provided with an upper splint 111 and a lower splint 112; the movable splint 12 is movable between the upper splint 111 and the lower splint 112; the movable splint 12 is arranged in parallel with the upper splint 111; The Z-axis driving assembly 13 includes a drive screw 131 provided on the upper clamping plate 111 and a threaded hole 132 provided on the movable clamping plate 12; The sliding block 142 on the top and the sliding rail 141 adapted to the sliding block 142 ; the sliding rail 141 is connected with the movable splint 12 . The Z-axis sliding assembly 14 is used to guide the movable splint 12 close to or away from the upper splint 111; through the Z-axis drive assembly 13, the movable splint 12 approaches or moves away from the...
Embodiment 2
[0057] The present invention also proposes a method for pressing and retrieving materials, referring to image 3 , including the following steps:
[0058] S10 acquires the image information of the cut material sheet; in this step, the image information of the cut material sheet is obtained through the industrial camera arranged above the platen device 10, and the image information is transmitted to the visual recognition module through the PLC.
[0059] S20 obtains the position information of the workpiece 20 according to the image information and nesting map information; the visual recognition module identifies the cut workpiece 20 according to the image information of the material sheet and the nesting map information in the PLC memory, thereby obtaining each workpiece 20 location information. Specifically, the industrial camera takes pictures to obtain the picture information of the workpiece 20, takes the camera as the origin, obtains the polar coordinate information of e...
Embodiment 3
[0071] In another embodiment of the present invention, the planning of the fetching path information and the pressing path information according to the position information of the workpiece 20 further includes the following steps:
[0072] According to the position information of the workpiece 20 and the image information of the material plate, the position information of the waste material 30 is obtained;
[0073] The pressing path information is generated according to the position information of the waste material 30 .
[0074] In this step, the PLC generates picking path information according to the position information of the workpiece 20 in the order of picking up row by row or column by column or S-shaped path.
[0075] The contour model of the clamping plate is projected on the waste material to obtain the position information of the clamping area of the waste material, in which the edge of the waste material cannot overlap with the edge of the movable splint 12 .
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More