

Object three-dimensional point cloud registration algorithm based on local point pair features
A technology of three-dimensional point cloud and registration algorithm, applied in the field of three-dimensional reconstruction of object virtual space, can solve the problems of low accuracy and poor robustness, and achieve the effect of enhancing robustness, improving robustness and improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The technical solution of the present invention will be further described in detail below in conjunction with the description of the drawings and specific embodiments.
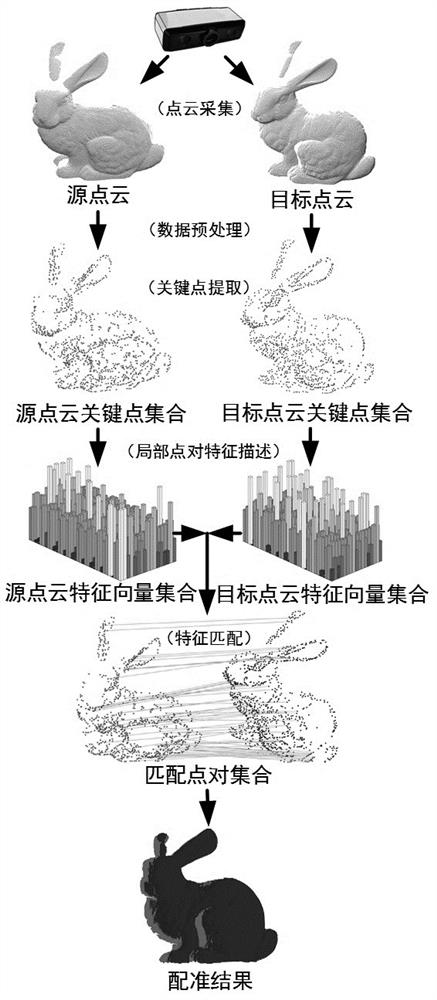
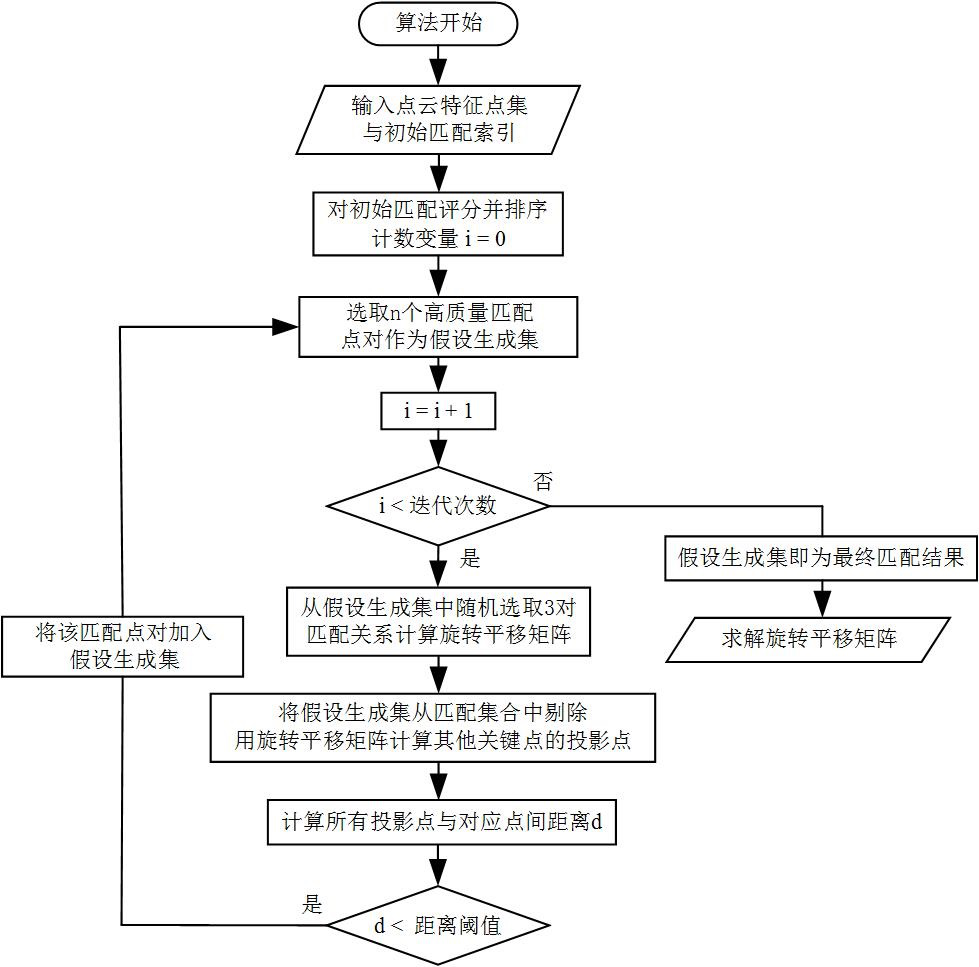
[0035] Such as figure 1 , figure 2 and image 3 As shown, a kind of Hough voting-based augmented reality system object recognition algorithm of the present invention is specifically implemented according to the following steps:
[0036] Step 1. Obtain 3D point cloud data from multiple different angles of the object through the depth camera;
[0037] Step 2, preprocessing the point cloud data obtained in step 1;
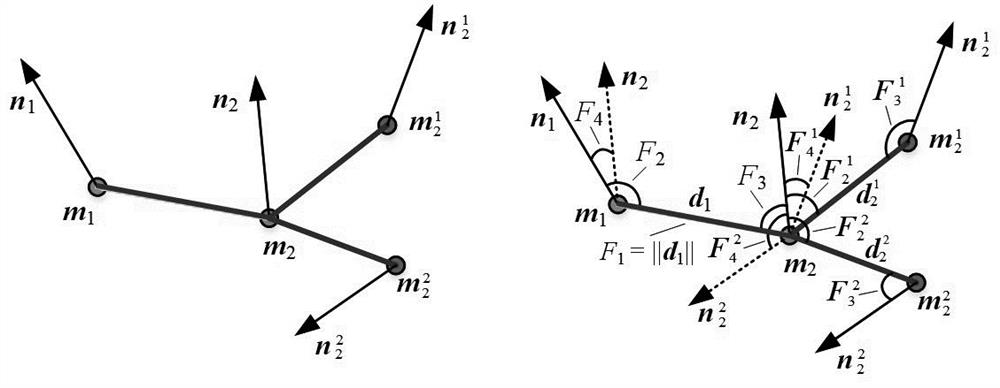
[0038] Step 3, extract key points from the point cloud obtained in step 2 by formula (1), and obtain point sets that are relatively prominent or concave on the surface of the object;
[0039]
[0040] p in formula (1) i For any point on the point cloud, p i The normal vector is n i , its neighboring point p ij The normal vector is n ij , k is the number of adjacent points, j=1,2,.....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More