

Stiffness modeling and identification method for seven-degree-of-freedom collaborative robot
An identification method and robot technology, applied in the direction of instruments, adaptive control, control/adjustment systems, etc., can solve the problems of increasing the rigidity of the whole machine, affecting the dynamic performance and precision of the robot, and reducing the sensitivity of errors and construction. The effect of reducing the workload and improving the recognition accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0081] The present invention will be described in further detail below in conjunction with the accompanying drawings.
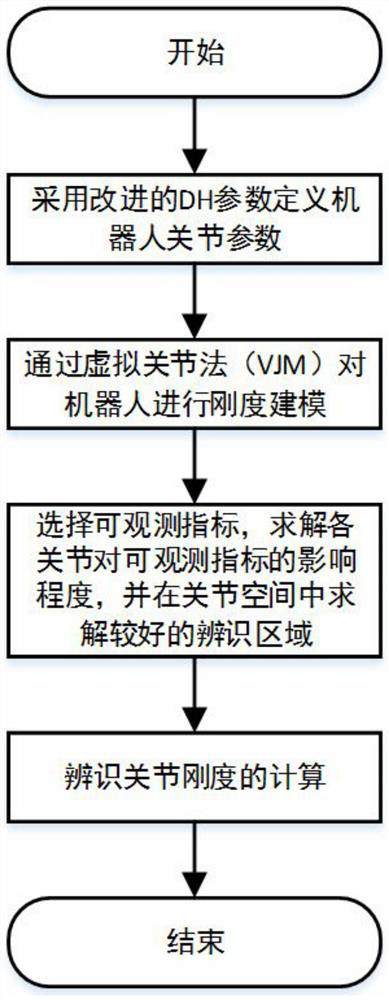
[0082] Such as Figure 1~5 Shown, the present invention comprises the steps:
[0083] Step 1: Carry out kinematic modeling on the robot and define the parameters of the robot joints.
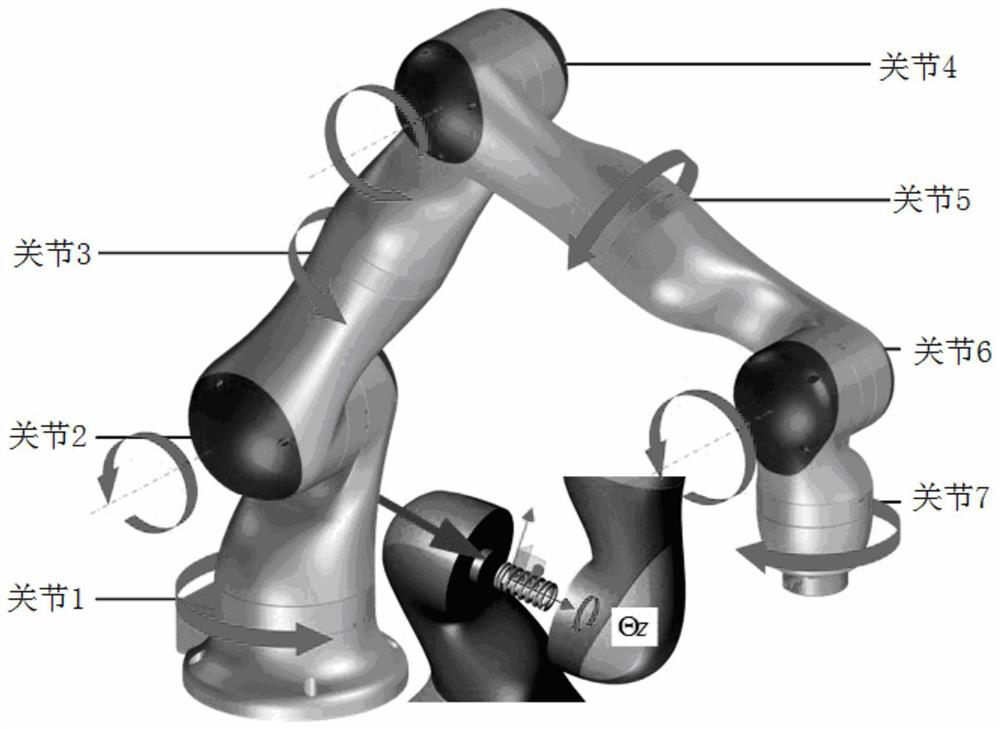
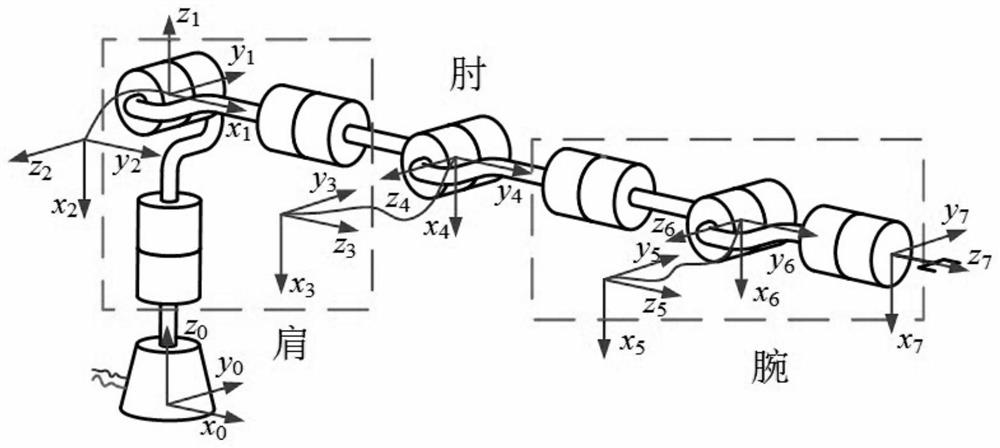
[0084] Such as Figure 2~3 As shown, the seven-degree-of-freedom redundant robot can be regarded as composed of eight connecting rods and seven joints, and the DHm parametric modeling method can pass the connecting rod rotation angle α i-1 , connecting rod length a i-1 , connecting rod offset d i , joint angle θ i Four parameters are used to describe the kinematic characteristics of the connecting rod, where α i-1 、a i-1 Describe the kinematic properties of link i-1 itself, d i , θ i Describe the connection relationship between link i-1 and link i.
[0085] Coordinate system O i -x i the y i z i relative to the coordinate system O i-1 -x i-1 the y i-1 z i-1 Th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More