

Amphibious operation method of intelligent robot
An intelligent robot and amphibious technology, applied in the direction of instruments, non-electric variable control, two-dimensional position/channel control, etc., to achieve the effect of meeting the needs of robot operations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention is an amphibious operation method of an amphibious intelligent robot. The embodiments of the present invention will be described below in conjunction with the accompanying drawings, and the specific implementation will be further described.
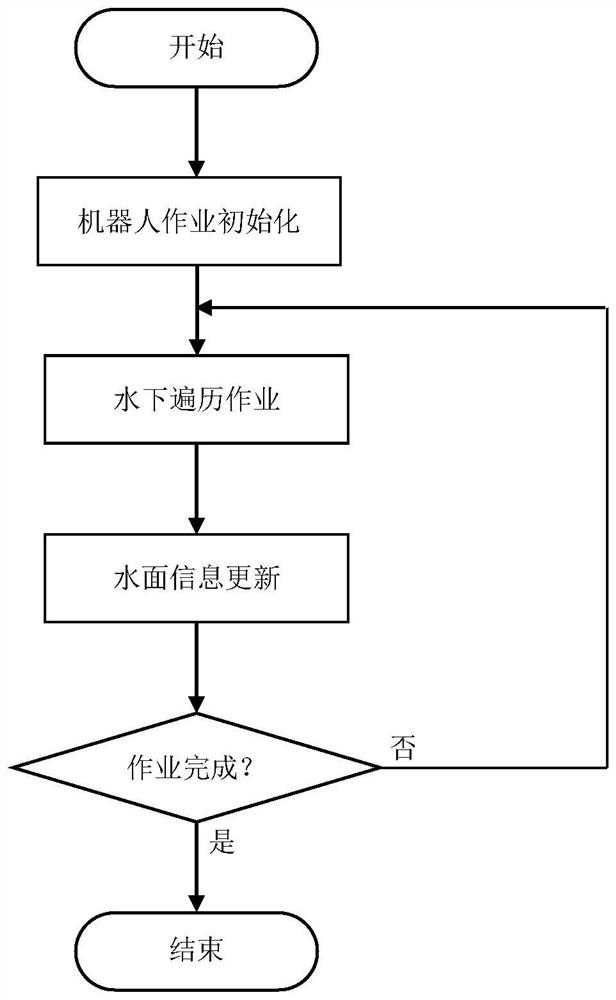
[0035] figure 1 It is a flow chart of the amphibious operation method of the intelligent robot, which includes at least three stages from the beginning of the operation to the end of the operation: the operation initialization of the intelligent robot (001), the underwater traversal operation stage, and the water surface information update stage, in which the underwater traversal operation stage and the water surface information The update phase constitutes an amphibious job cycle, and if the job is not completed, the job cycle is repeated until the job is completed.
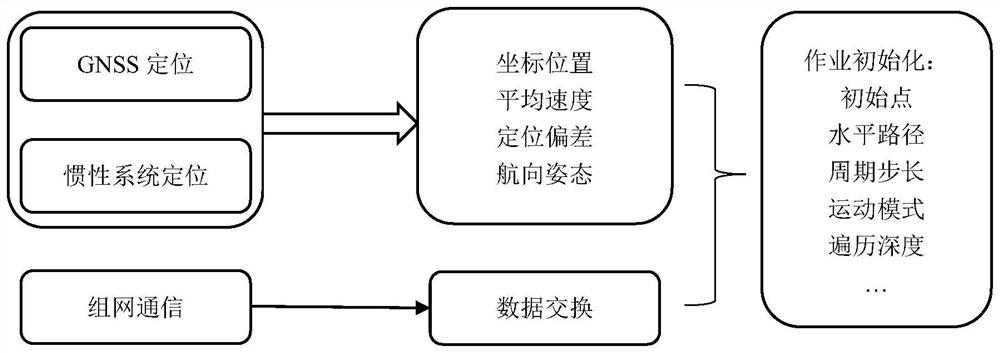
[0036] figure 2 It is a schematic diagram of the initialization of the intelligent robot operation. The intelligent robot (001) obtains infor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More