

Bionic tower climbing robot
A robot and body technology, applied in the field of bionic tower climbing robots, can solve the problems of difficulty in vertical tower climbing, small focus, and failure to prevent falls from climbing towers at high altitudes.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
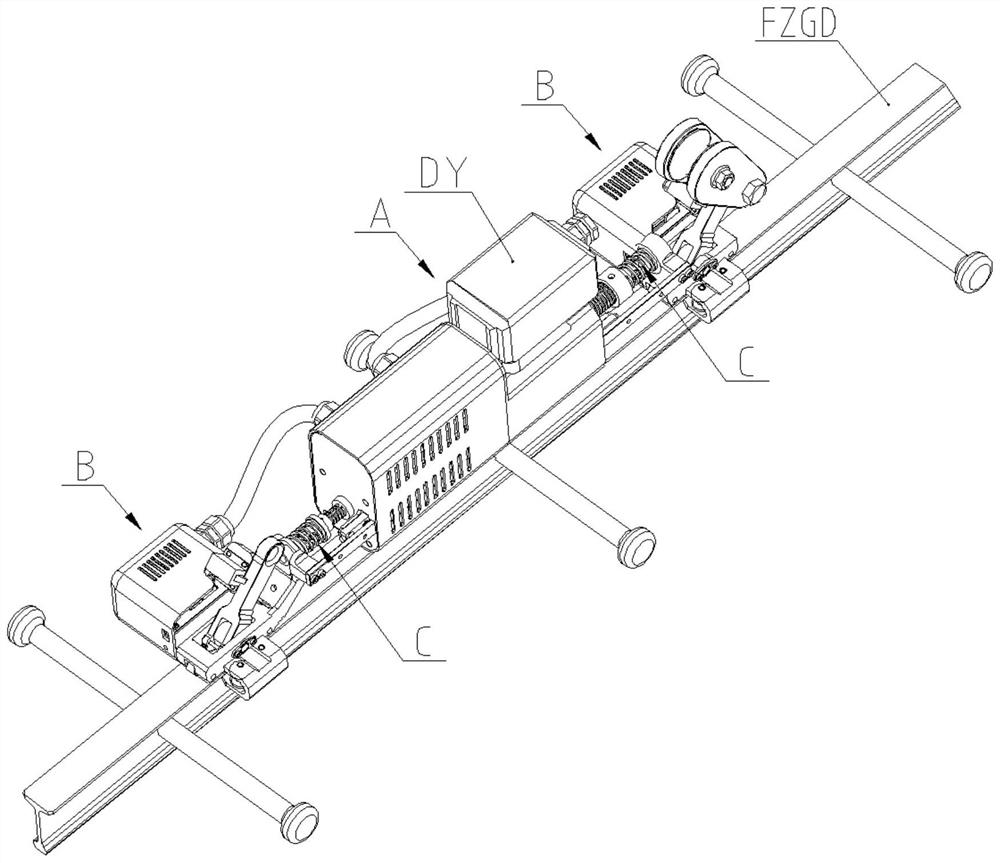
[0026] combine Figure 1 to Figure 8 It can be seen that the bionic tower climbing robot disclosed in this embodiment mainly includes a main control body module A and a clamping and moving mechanism module B. The two ends of the main control body module A are respectively connected to a clamp through an elastic universal joint C. Tightly move the mechanism module B.
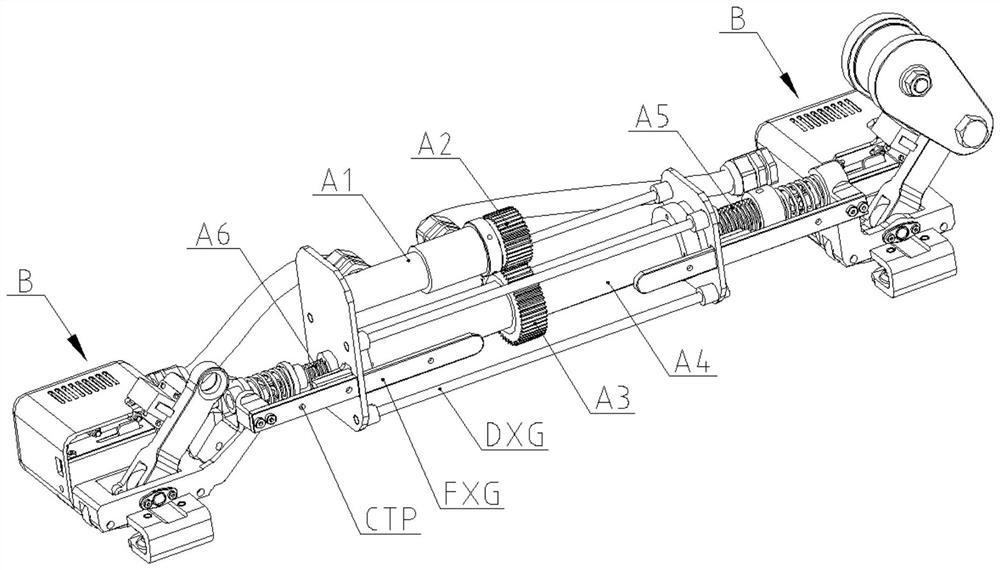
[0027] The main control body module A includes a casing, a main motor, a driving gear, a driven gear, a rotating shaft, a retractable screw, a screw sleeve and a card holder;
[0028] The main motor A1 adopts a servo motor, and its output shaft is connected to the driving gear A2 through a coupling, the driven gear A3 is meshed directly under the driving gear, and the driven gear A3 is fixed in the middle of the rotating shaft A4, and the rotating shaft is a hollow shaft.
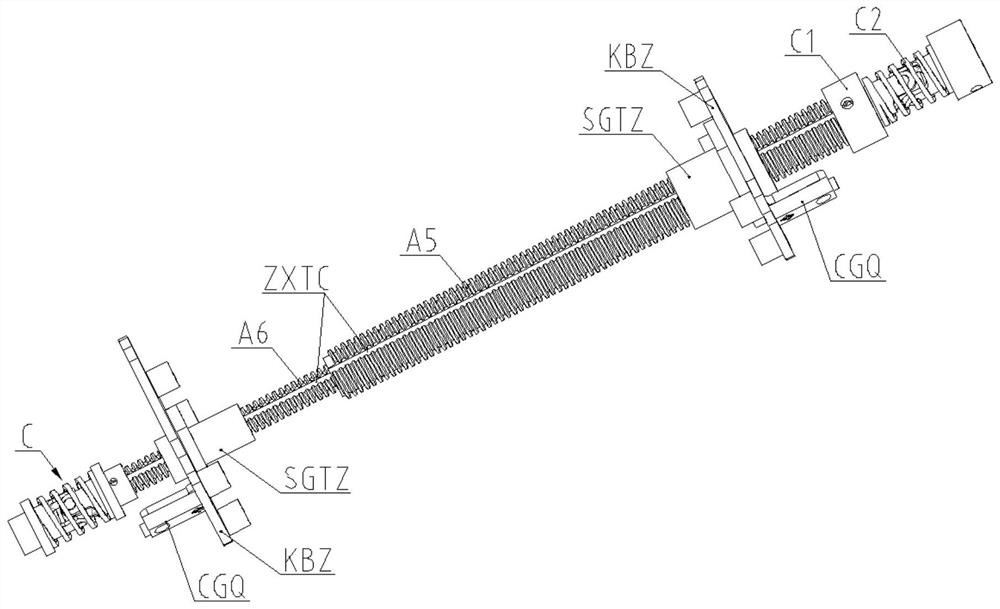
[0029] The retractable lead screw includes a large diameter lead screw A5 and a small diameter lead screw A6, and the outer walls of the lar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More